Filtering, Conversion, and Geometric Operations
Use Lidar Toolbox™ functions to transform raw point cloud data into a format that is easier to analyze. You can apply filtering algorithms, including downsampling and denoising, convert point cloud data into a surface mesh and digital elevation model (DEM), and fit geometric models, such as planes and cuboids, to point cloud data.
You can also interactively visualize, process, and analyze point cloud data using the Lidar Viewer app. For more information, see Get Started with Lidar Viewer.
Apps
| Lidar Viewer | Visualize and analyze lidar data (Since R2021b) |
Functions
Topics
- Introduction to Lidar
High-level overview of lidar concepts and applications.
- Coordinate Systems in Lidar Toolbox
Overview of coordinate systems in Lidar Toolbox.
- What Are Organized and Unorganized Point Clouds?
Define unorganized and organized point clouds and how to convert the former to latter.
- Get Started with Lidar Viewer
Interactively visualize and analyze lidar data.
- Create Custom Preprocessing Algorithm with Lidar Viewer
Create a custom algorithm to preprocess the input point cloud using the lidar viewer app.
- Estimate Transformation Between Two Point Clouds Using Features
This example shows how to estimate a rigid transformation between two point clouds.
- Estimate Stockpile Volume from Aerial Lidar Data
This example shows how to estimate the volume of a stockpile from aerial point cloud data.
- Colorize Aerial Point Cloud Using Aerial Image
Fuse the color from an aerial image onto aerial point cloud data using Coordinate Reference System (CRS) information. (Since R2025a)
Featured Examples

Visualize Point Clouds On Maps Using Coordinate Reference System From LAS/LAZ Files
Transform a point cloud between coordinate reference systems.
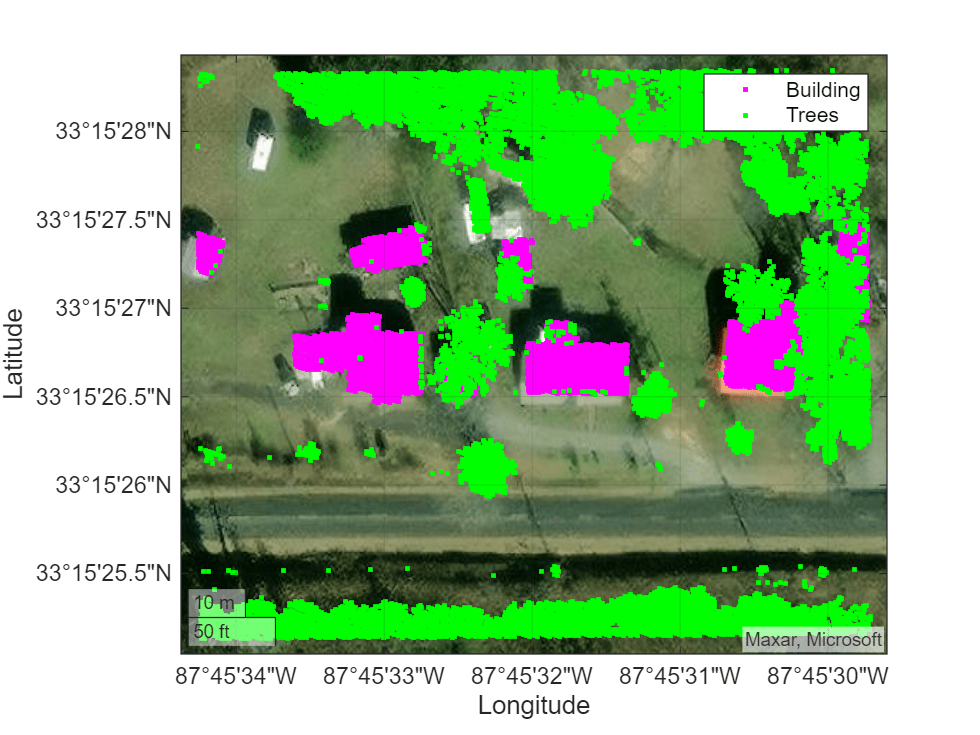
Export Point Cloud Segmentations to KML Files
Export segmented point cloud data to a Keyhole Markup Language (KML) files and read and visualize the KML data using different tools.
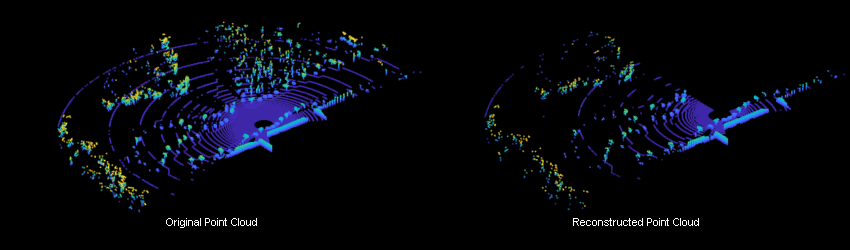
Unorganized to Organized Conversion of Point Clouds Using Spherical Projection
Convert unorganized point clouds to organized format using spherical projection.

Create, Process, and Export Digital Surface Model from Lidar Data
Process aerial lidar data received from an airborne lidar system into a GeoTIFF file. Import a LAZ file containing aerial lidar data, create a spatially referenced digital surface model (DSM) from the data, crop the DSM to an area of interest, and export the cropped DSM to a GeoTIFF file.

Extract On-Road and Off-Road Points from Point Cloud
Extract on-road and off-road points from point cloud data.