SLAM
La localización y mapeo simultáneos (SLAM) utilizan los algoritmos Aplicación y para construir un mapa y localizar el vehículo en ese mapa al mismo tiempo. Utilice lidarSLAM para ajustar su propio algoritmo SLAM que procesa escaneos LiDAR y estimaciones de pose de odometría para construir un mapa de forma iterativa. Utilice buildMap para tomar datos registrados y filtrados y crear un mapa usando SLAM. La app SLAM Map Builder permite modificar manualmente las poses relativas y alinear los escaneos para mejorar la precisión del mapa.
Para obtener más información sobre qué es SLAM y otras herramientas SLAM en otras toolboxes de MATLAB®, consulte ¿Qué es SLAM?.
Apps
| SLAM Map Builder | Cree mapas de cuadrícula 2D utilizando SLAM basado en LiDAR |
Funciones
Temas
- Elija el flujo de trabajo SLAM según los datos del sensor
Elija el flujo de trabajo de localización y mapeo simultáneos (SLAM) adecuado y encuentre temas, ejemplos y funciones compatibles.
- Gráfico de factores para SLAM
Aprenda sobre el gráfico de factores y cómo utilizarlo para aplicaciones SLAM.
Ejemplos destacados
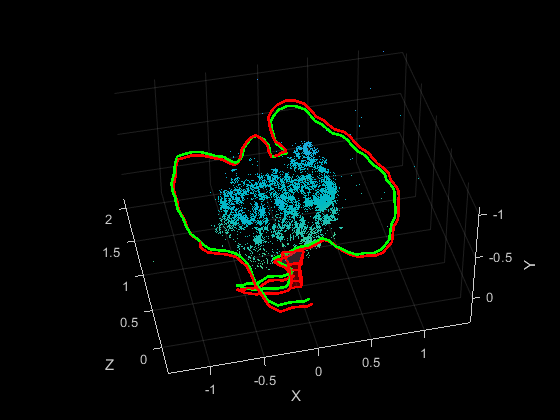
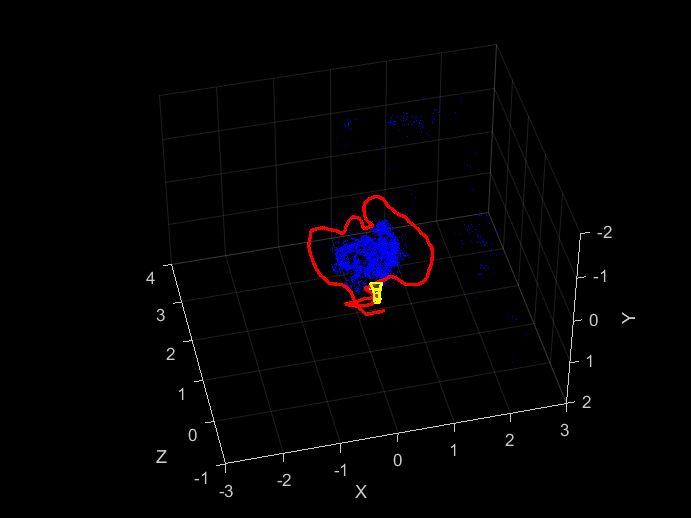
SLAM visual monocular de alto rendimiento y fácil de implementar
Localización y mapeo visual simultáneo (vSLAM) se refiere al proceso de calcular la posición y orientación de una cámara con respecto a su entorno mientras se mapea simultáneamente el entorno. Las aplicaciones de vSLAM incluyen realidad aumentada, robótica y conducción autónoma. En este ejemplo, el algoritmo utiliza únicamente entradas visuales de la cámara.

Construya un mapa a partir de datos Lidar usando SLAM
Procesar datos LiDAR 3D de un sensor en un vehículo para construir progresivamente un mapa y estimar la trayectoria utilizando SLAM.

Odometría visual-inercial monocular (VIO) mediante grafo de factores
Implementar odometría visual-inercial monocular para localizar un UAV utilizando datos de cámara e IMU, optimizados mediante un grafo de factores.
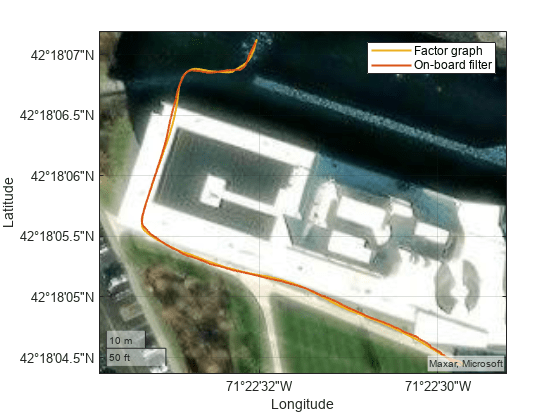
Localización de peatones basada en gráficos de factores con sensores IMU y GPS
Este ejemplo muestra cómo estimar la posición de un peatón utilizando datos de sensores registrados de una unidad de medición inercial (IMU) y un receptor del Sistema de posicionamiento global (GPS) y un gráfico de factores.
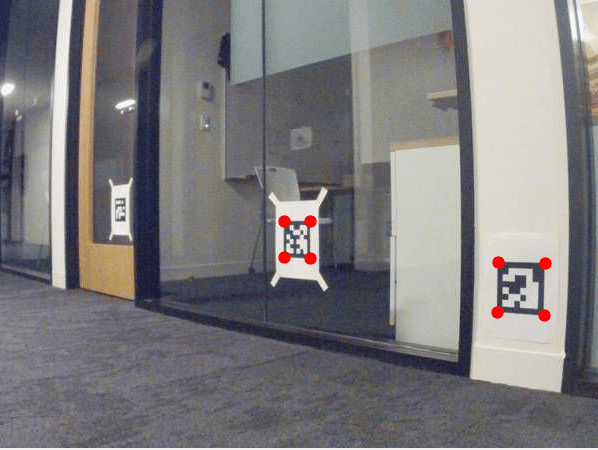
SLAM de punto de referencia usando marcadores AprilTag
Combine los datos de odometría del robot y los marcadores AprilTag para implementar SLAM con un gráfico de factores y un gráfico de pose, y compare los resultados.

Mapee el área interior usando Lidar SLAM y gráfico de factores
Implemente SLAM lidar fuera de línea en escaneos lidar recopilados para mapear un área interior utilizando un gráfico de factores y un mapa de escaneo lidar.
Construya e implemente el algoritmo SLAM visual con ROS en MATLAB
Implemente un algoritmo SLAM visual monocular para estimar las poses de la cámara e implementar el código C++ generado usando ROS.

Simulación del sistema SLAM visual RGB-D con cosimulación en Gazebo y Simulink
Utilice imágenes RGB y de profundidad de un robot para simular un sistema SLAM visual RGB-D en Simulink.
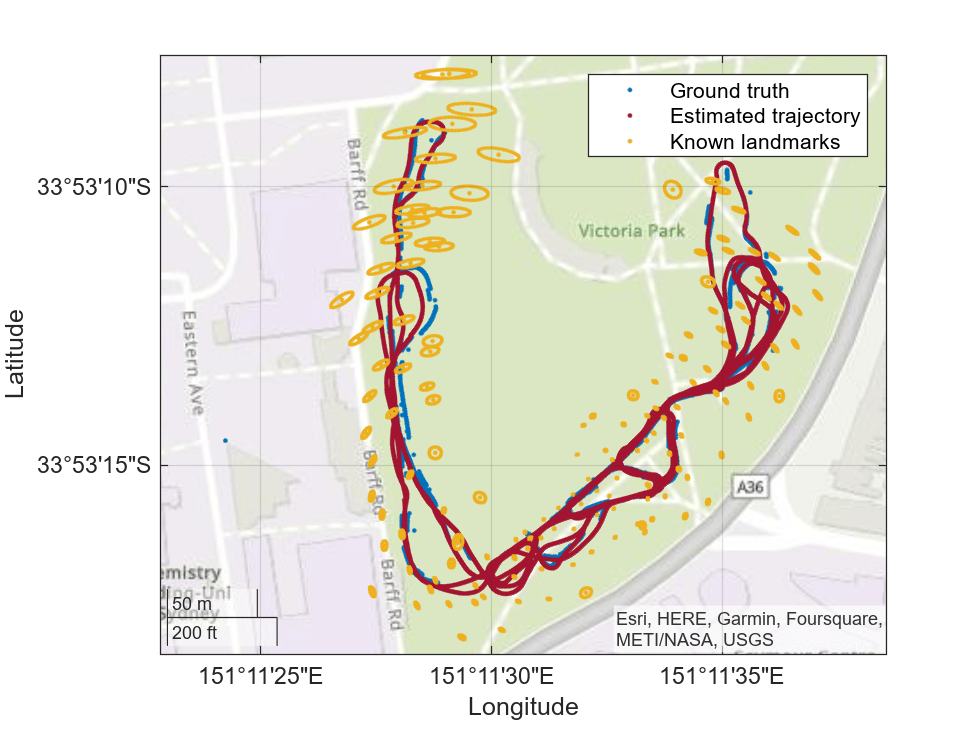
SLAM basado en EKF con puntos de referencia
Implemente SLAM de referencia utilizando el algoritmo de filtro Kalman extendido para rastrear la ruta de un vehículo y mapear los alrededores.

Implementar localización y mapeo simultáneos (SLAM) con escaneos LiDAR
Implementar SLAM sin conexión utilizando un grafo de poses y una serie de escaneos LiDAR, y construir un mapa del entorno.