Fusión de sensores inerciales
La fusión de sensores inerciales utiliza filtros para mejorar y combinar lecturas de IMU, GPS y otros sensores. Para modelar sensores específicos, consulte Modelos de sensor.
Para localización y mapeo simultáneos, consulte SLAM.
Funciones
Bloques
| AHRS | Orientación a partir de lecturas de acelerómetro, giroscopio y magnetómetro |
| Complementary Filter | Estimar la orientación mediante filtro complementario. (Desde R2023a) |
| IMU Filter | Estimar la orientación usando el filtro IMU (Desde R2023b) |
| ecompass | Calcular la orientación a partir de las lecturas del acelerómetro y el magnetómetro (Desde R2024a) |
Temas
Fusión de sensores
- Elija filtros de fusión de sensores inerciales
Aplicabilidad y limitaciones de varios filtros de fusión de sensores inerciales. - Estimación de la orientación mediante la fusión de sensores inerciales
Este ejemplo muestra cómo utilizar algoritmos de fusión de 6 y 9 ejes para calcular la orientación. - Orientación de estimación con un filtro complementario y datos IMU
Este ejemplo muestra cómo transmitir datos IMU desde una placa Arduino y estimar la orientación utilizando un filtro complementario. - Alineación de datos del sensor registrado para estimación de orientación
Este ejemplo muestra cómo alinear y preprocesar los datos del sensor registrados. - Orientación del filtro de paso bajo utilizando Quaternion SLERP
Este ejemplo muestra cómo utilizar la interpolación lineal esférica (SLERP) para crear secuencias de cuaterniones y trayectorias ruidosas de filtro de paso bajo. - Estimación de la postura a partir de sensores asincrónicos
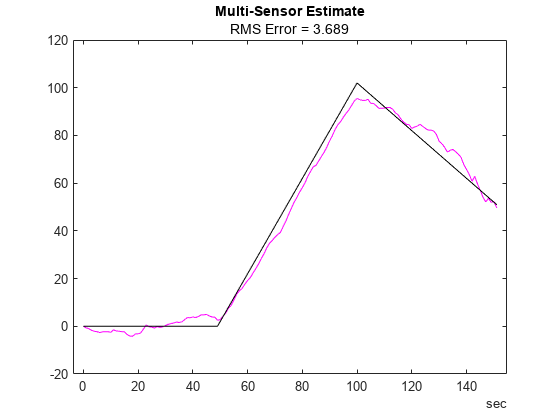
Este ejemplo muestra cómo se pueden fusionar sensores a diferentes velocidades para estimar la pose. - Ajuste personalizado de filtros Fusion
Utilice la funcióntunepara optimizar los parámetros de ruido de varios filtros de fusión, incluido el objetoahrsfilter. - Fusionar datos de sensores inerciales mediante un marco de fusión flexible basado en insEKF
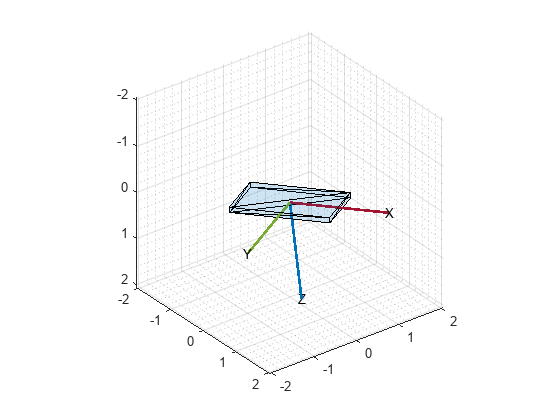
El objeto de filtroinsEKFproporciona un marco flexible que puede utilizar para fusionar datos de sensores inerciales. - Estimación de la pose de un vehículo submarino autónomo mediante sensores inerciales y registros de velocidad Doppler
Este ejemplo muestra cómo fusionar datos de un GPS, un registro de velocidad Doppler (DVL) y sensores de unidades de medición inercial (IMU) para estimar la pose de un vehículo submarino autónomo (AUV) que se muestra en esta imagen.
Aplicaciones
- Representación de audio binaural mediante seguimiento de cabeza
Realice un seguimiento de la orientación de la cabeza fusionando los datos recibidos de una IMU y luego controle la dirección de llegada de una fuente de sonido aplicando funciones de transferencia relacionadas con la cabeza (HRTF). - Estimación del ángulo de inclinación mediante fusión de sensores inerciales y ADIS16505
Obtenga datos del sensor IMU ADIS16505 de Analog Devices y utilice la fusión de sensores en los datos para calcular la inclinación del sensor. (Desde R2024a) - Transmisión inalámbrica de datos y fusión de sensores mediante BNO055
Este ejemplo muestra cómo obtener datos de un sensor IMU BNO055 de Bosch a través de un módulo Bluetooth® HC-05 y cómo utilizar el algoritmo de fusión AHRS de 9 ejes en los datos del sensor para calcular la orientación del dispositivo.
Ejemplos destacados
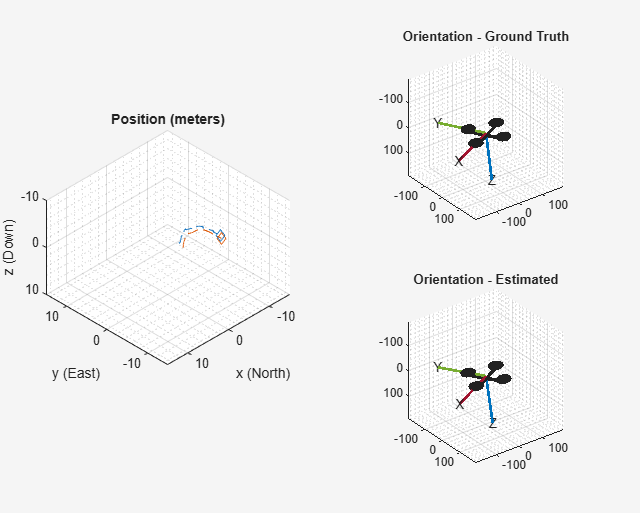
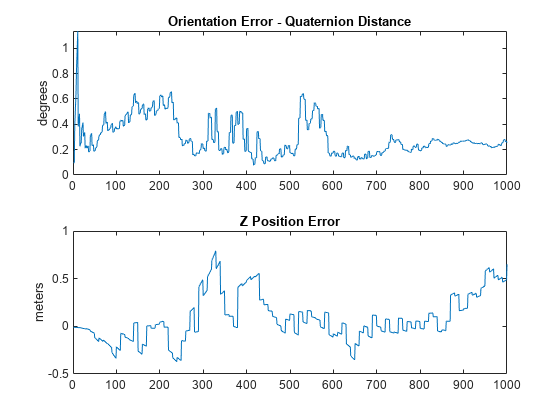
Fusión IMU y GPS para navegación inercial
Este ejemplo muestra cómo se podría construir un algoritmo de fusión IMU + GPS adecuado para vehículos aéreos no tripulados (UAV) o cuadricópteros.

Estimar la posición y orientación de un vehículo terrestre
Este ejemplo muestra cómo estimar la posición y orientación de vehículos terrestres fusionando datos de una unidad de medición inercial (IMU) y un receptor del sistema de posicionamiento global (GPS).

Estimación de la pose del vehículo terrestre para IMU y GNSS estrechamente acoplados
Este ejemplo muestra cómo estimar la posición y orientación de un vehículo terrestre construyendo un filtro Kalman extendido estrechamente acoplado y usándolo para fusionar mediciones de sensores. Un filtro estrechamente acoplado fusiona lecturas de unidades de medición inercial (IMU) con lecturas sin procesar del sistema de navegación global por satélite (GNSS). Por el contrario, un filtro débilmente acoplado fusiona las lecturas de la IMU con las lecturas filtradas del receptor GNSS.
Estimar la orientación y la altura utilizando IMU, magnetómetro y altímetro
Este ejemplo muestra cómo fusionar datos de un acelerómetro de 3 ejes, un giroscopio de 3 ejes, un magnetómetro de 3 ejes (comúnmente denominados sensores MARG para velocidad magnética, angular y gravedad) y un altímetro de 1 eje para estimar la orientación. y altura.
Estimar la orientación del teléfono mediante Sensor Fusion
MATLAB ® Mobile™ informa datos de los sensores del acelerómetro, giroscopio y magnetómetro en dispositivos móviles Apple o Android®. Se pueden obtener datos sin procesar de cada sensor o datos de orientación fusionados. Este ejemplo muestra cómo comparar los datos de orientación fusionados del teléfono con la estimación de orientación del objeto ahrsfilter.

Odometría visual-inercial utilizando datos sintéticos
Este ejemplo muestra cómo estimar la pose (posición y orientación) de un vehículo terrestre utilizando una unidad de medición inercial (IMU) y una cámara monocular. En este ejemplo, usted:

Ajuste automático del filtro insfilterAsync
El objeto insfilterAsync es un filtro Kalman extendido complejo que estima la postura del dispositivo. Sin embargo, ajustar manualmente el filtro o encontrar los valores óptimos para los parámetros de ruido puede ser una tarea desafiante. Este ejemplo ilustra cómo utilizar la función tune para optimizar los parámetros del ruido del filtro.
Filtro Design Fusion para sensores personalizados
Este ejemplo presenta cómo personalizar los modelos de sensores utilizados con un objeto insEKF.
Estimación de la orientación mediante mediciones de orientación derivadas del GPS
Este ejemplo muestra cómo definir y utilizar un modelo de sensor personalizado para el objeto insEKF junto con modelos de sensor integrados. Utilizando un sensor de ángulo de guiñada personalizado, un acelerómetro y un giroscopio, este ejemplo utiliza el objeto insEKF para determinar la orientación de un vehículo. Utiliza la velocidad de un receptor GPS para calcular la orientación del vehículo. Siguiendo un enfoque similar al que se muestra en este ejemplo, puede desarrollar modelos de sensores personalizados para sus propias aplicaciones de fusión de sensores.
Estimar la orientación utilizando el filtro AHRS y los datos IMU en Simulink
Este ejemplo muestra cómo transmitir datos IMU desde sensores conectados a la placa Arduino® y estimar la orientación utilizando el filtro AHRS y el sensor IMU.