tune
Ajuste los parámetros ahrsfilter para reducir el error de estimación
Descripción
tune( ajusta las propiedades del objeto de filtro filter,sensorData,groundTruth)ahrsfilter, filter, para reducir el error de distancia de cuaternión de raíz cuadrada media (RMS) entre los datos del sensor fusionado y la ground-truth. La función utiliza los valores de propiedad en el filtro como estimación inicial para el algoritmo de optimización.
tune(___, especifica la configuración de ajuste basada en un objeto config)tunerconfig, config.
Ejemplos
Cargue datos de sensores registrados y datos ground-truth.
ld = load('ahrsfilterTuneData.mat'); qTrue = ld.groundTruth.Orientation; % true orientation
Crea un objeto arhsfitler.
fuse = ahrsfilter;
Fusione los datos del sensor utilizando el filtro no ajustado predeterminado.
qEstUntuned = fuse(ld.sensorData.Accelerometer, ...
ld.sensorData.Gyroscope, ld.sensorData.Magnetometer);Cree un objeto tunerconfig. Ajuste el objeto ahrsfilter para mejorar la estimación de la orientación en función de la configuración.
config = tunerconfig('ahrsfilter');
tune(fuse,ld.sensorData,ld.groundTruth,config); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.1345
1 GyroscopeNoise 0.1342
1 MagnetometerNoise 0.1341
1 GyroscopeDriftNoise 0.1341
1 LinearAccelerationNoise 0.1332
1 MagneticDisturbanceNoise 0.1324
1 LinearAccelerationDecayFactor 0.1317
1 MagneticDisturbanceDecayFactor 0.1316
2 AccelerometerNoise 0.1316
2 GyroscopeNoise 0.1312
2 MagnetometerNoise 0.1311
2 GyroscopeDriftNoise 0.1311
2 LinearAccelerationNoise 0.1300
2 MagneticDisturbanceNoise 0.1292
2 LinearAccelerationDecayFactor 0.1285
2 MagneticDisturbanceDecayFactor 0.1285
3 AccelerometerNoise 0.1285
3 GyroscopeNoise 0.1280
3 MagnetometerNoise 0.1279
3 GyroscopeDriftNoise 0.1279
3 LinearAccelerationNoise 0.1267
3 MagneticDisturbanceNoise 0.1258
3 LinearAccelerationDecayFactor 0.1253
3 MagneticDisturbanceDecayFactor 0.1253
4 AccelerometerNoise 0.1252
4 GyroscopeNoise 0.1247
4 MagnetometerNoise 0.1246
4 GyroscopeDriftNoise 0.1246
4 LinearAccelerationNoise 0.1233
4 MagneticDisturbanceNoise 0.1224
4 LinearAccelerationDecayFactor 0.1220
4 MagneticDisturbanceDecayFactor 0.1220
5 AccelerometerNoise 0.1220
5 GyroscopeNoise 0.1213
5 MagnetometerNoise 0.1212
5 GyroscopeDriftNoise 0.1212
5 LinearAccelerationNoise 0.1200
5 MagneticDisturbanceNoise 0.1190
5 LinearAccelerationDecayFactor 0.1187
5 MagneticDisturbanceDecayFactor 0.1187
6 AccelerometerNoise 0.1187
6 GyroscopeNoise 0.1180
6 MagnetometerNoise 0.1178
6 GyroscopeDriftNoise 0.1178
6 LinearAccelerationNoise 0.1167
6 MagneticDisturbanceNoise 0.1156
6 LinearAccelerationDecayFactor 0.1155
6 MagneticDisturbanceDecayFactor 0.1155
7 AccelerometerNoise 0.1155
7 GyroscopeNoise 0.1147
7 MagnetometerNoise 0.1145
7 GyroscopeDriftNoise 0.1145
7 LinearAccelerationNoise 0.1137
7 MagneticDisturbanceNoise 0.1126
7 LinearAccelerationDecayFactor 0.1125
7 MagneticDisturbanceDecayFactor 0.1125
8 AccelerometerNoise 0.1125
8 GyroscopeNoise 0.1117
8 MagnetometerNoise 0.1116
8 GyroscopeDriftNoise 0.1116
8 LinearAccelerationNoise 0.1112
8 MagneticDisturbanceNoise 0.1100
8 LinearAccelerationDecayFactor 0.1099
8 MagneticDisturbanceDecayFactor 0.1099
9 AccelerometerNoise 0.1099
9 GyroscopeNoise 0.1091
9 MagnetometerNoise 0.1090
9 GyroscopeDriftNoise 0.1090
9 LinearAccelerationNoise 0.1090
9 MagneticDisturbanceNoise 0.1076
9 LinearAccelerationDecayFactor 0.1075
9 MagneticDisturbanceDecayFactor 0.1075
10 AccelerometerNoise 0.1075
10 GyroscopeNoise 0.1066
10 MagnetometerNoise 0.1064
10 GyroscopeDriftNoise 0.1064
10 LinearAccelerationNoise 0.1064
10 MagneticDisturbanceNoise 0.1049
10 LinearAccelerationDecayFactor 0.1047
10 MagneticDisturbanceDecayFactor 0.1047
11 AccelerometerNoise 0.1047
11 GyroscopeNoise 0.1038
11 MagnetometerNoise 0.1036
11 GyroscopeDriftNoise 0.1036
11 LinearAccelerationNoise 0.1036
11 MagneticDisturbanceNoise 0.1016
11 LinearAccelerationDecayFactor 0.1014
11 MagneticDisturbanceDecayFactor 0.1014
12 AccelerometerNoise 0.1014
12 GyroscopeNoise 0.1005
12 MagnetometerNoise 0.1002
12 GyroscopeDriftNoise 0.1002
12 LinearAccelerationNoise 0.1002
12 MagneticDisturbanceNoise 0.0978
Fusione los datos del sensor utilizando el filtro ajustado.
qEstTuned = fuse(ld.sensorData.Accelerometer, ...
ld.sensorData.Gyroscope, ld.sensorData.Magnetometer);Compare el rendimiento de los errores RMS ajustados y no ajustados.
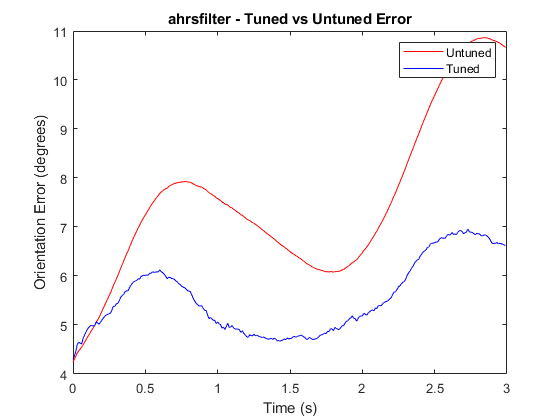
dUntuned = rad2deg(dist(qEstUntuned, qTrue)); dTuned = rad2deg(dist(qEstTuned, qTrue)); rmsUntuned = sqrt(mean(dUntuned.^2))
rmsUntuned = 7.7088
rmsTuned = sqrt(mean(dTuned.^2))
rmsTuned = 5.6033
Visualizar los errores con respecto al tiempo.
N = numel(dUntuned); t = (0:N-1)./ fuse.SampleRate; plot(t, dUntuned, 'r', t, dTuned, 'b'); legend('Untuned', 'Tuned'); title('ahrsfilter - Tuned vs Untuned Error') xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Argumentos de entrada
Referencias
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Historial de versiones
Introducido en R2020b