cuaternión
Crear un arreglo de cuaterniones
Descripción
Un cuaternión es un número hipercomplejo de cuatro partes que se usa en orientaciones y rotaciones tridimensionales.
Un número cuaternión se representa con el formato , donde las partes a, b, c y d son números reales, e i, j y k son los elementos básicos que satisfacen la ecuación: i2 = j2 = k2 = ijk = −1.
El conjunto de cuaterniones, indicado mediante H, se define dentro de un espacio vectorial de cuatro dimensiones sobre los números reales, R4. Cada elemento de H tiene una representación única basada en una combinación lineal de los elementos básicos i, j y k.
Todas las rotaciones en 3D se pueden describir mediante un eje de rotación y un ángulo en torno a ese eje. Una ventaja de los cuaterniones sobre las matrices de rotación es que el eje y el ángulo de rotación son fáciles de interpretar. Por ejemplo, considere un punto en R3. Para rotar el punto, se define un eje de rotación y un ángulo de rotación.
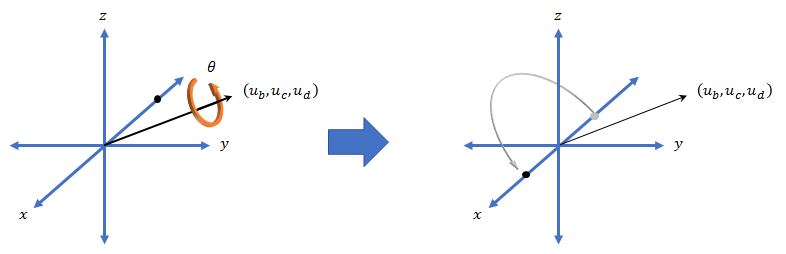
La representación cuaternaria de la rotación se puede expresar como , donde θ es el ángulo de rotación y [ub, uc y ud] es el eje de rotación.
Creación
Sintaxis
Descripción
quat = quaternion()
quat = quaternion(A,B,C,D)A, B, C y D. Todas las entradas deben tener el mismo tamaño y ser del mismo tipo de datos.
quat = quaternion(matrix)
quat = quaternion(RV,"rotvec")RV. Cada fila de RV representa un vector de rotación en radianes.
quat = quaternion(RV,"rotvecd")RV. Cada fila de RV representa un vector de rotación en grados.
quat = quaternion(transformation)transformation.
quat = quaternion(rotation)rotation.
Argumentos de entrada
Partes de un cuaternión, especificadas como cuatro escalares separados por comas, matrices o arreglos multidimensionales del mismo tamaño.
Ejemplo: quat = quaternion(1,2,3,4) crea un cuaternión con el formato 1 + 2i + 3j + 4k.
Ejemplo: quat = quaternion([1,5],[2,6],[3,7],[4,8]) crea un arreglo de cuaterniones de 1 por 2 donde quat(1,1) = 1 + 2i + 3j + 4k y quat(1,2) = 5 + 6i + 7j + 8k
Tipos de datos: single | double
Matriz de partes de un cuaternión, especificada como una matriz de N por 4. Cada fila representa un cuaternión independiente. Cada columna representa una parte de cuaternión independiente.
Ejemplo: quat = quaternion(rand(10,4)) crea un arreglo de cuaterniones de 10 por 1.
Tipos de datos: single | double
Matriz de vectores de rotación, especificada como una matriz de N por 3. Cada fila de RV representa los elementos [X Y Z] de un vector de rotación. Un vector de rotación es un vector unitario que representa el eje de rotación escalado por el ángulo de rotación en radianes o grados.
Para usar esta sintaxis, especifique el primer argumento como una matriz de vectores de rotación y el segundo argumento como "rotvec" o "rotvecd".
Ejemplo: quat = quaternion(rand(10,3),"rotvec") crea un arreglo de cuaterniones de 10 por 1.
Tipos de datos: single | double
Arreglo de matrices de rotación, especificado por una matriz de 3 por 3 o un arreglo de 3 por 3 por N. Cada página del arreglo representa una matriz de rotación independiente.
Ejemplo: quat = quaternion(rand(3),"rotmat","point")
Ejemplo: quat = quaternion(rand(3),"rotmat","frame")
Tipos de datos: single | double
Tipo de matriz de rotación, especificado por "point" o "frame".
Ejemplo: quat = quaternion(rand(3),"rotmat","point")
Ejemplo: quat = quaternion(rand(3),"rotmat","frame")
Tipos de datos: char | string
Matriz de ángulos de Euler, especificada por una matriz de N por 3. Si usa la sintaxis "euler", especifique E en radianes. Si usa la sintaxis "eulerd", especifique E en grados.
Ejemplo: quat = quaternion(E,"euler","YZY","point")
Ejemplo: quat = quaternion(E,"euler","XYZ","frame")
Tipos de datos: single | double
Secuencia de rotación, especificada como un vector de caracteres de tres elementos:
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
Suponga que desea determinar las nuevas coordenadas de un punto cuando su sistema de coordenadas se gira usando la rotación de marco. El punto se define en el sistema de coordenadas original como:
point = [sqrt(2)/2,sqrt(2)/2,0];
Gire el punto usando la representación del ángulo de Euler [45,45,0]. Gire el punto usando dos secuencias de rotación diferentes:
Si crea un rotador de cuaterniones y especifica la secuencia "ZYX", el marco se gira primero 45° alrededor del eje z y luego 45° alrededor del nuevo eje y.
quatRotator = quaternion([45,45,0],"eulerd","ZYX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.7071 -0.0000 0.7071
Si crea un rotador de cuaterniones y especifica la secuencia "YZX", el marco se gira primero 45° alrededor del eje y y luego 45° alrededor del nuevo eje z.
quatRotator = quaternion([45,45,0],"eulerd","YZX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.8536 0.1464 0.5000
Tipos de datos: char | string
Transformación, especificada como un objeto se3 o como un arreglo de N elementos de objetos se3. N es el número total de transformaciones.
El objeto quaternion ignora el componente de traslación de la transformación y convierte la submatriz de rotación de 3 por 3 de la transformación en un cuaternión.
Rotación ortonormal, especificada como un objeto so3 o como un arreglo de N elementos de objetos so3. N es el número total de rotaciones.