encode
Codificar el entorno del mapa utilizando el codificador de conjunto de puntos base
Desde R2024a
Sintaxis
Descripción
encodedValues = encode(bpsObj,environment)bpsEncoder.
[ además devuelve el punto de objeto más cercano para cada punto base. Los puntos de objeto son puntos que se encuentran en las áreas ocupadas en el entorno del mapa de entrada.encodedValues,nearestPoints] = encode(bpsObj,environment)
Ejemplos
Cargue un mapa de ejemplo en el espacio de trabajo y utilícelo para crear un mapa de ocupación con una resolución de 10 celdas/metro.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap,10);
Especifique la disposición del conjunto de puntos base para la codificación como "rectangular-grid".
arrangement = "rectangular-grid";Especifique el tamaño de codificación como [10 10]. Por lo tanto, el número de puntos base devueltos para codificar el entorno del mapa será 100.
encodingSize = [10 10];
Especifique las dimensiones de la cuadrícula rectangular. Para obtener resultados correctos, las dimensiones de la cuadrícula rectangular deben ser aproximadamente las mismas que las del entorno de entrada.
xLims = map.XLocalLimits; yLims = map.YLocalLimits; dims = [(xLims(2) - xLims(1)) (yLims(2) - yLims(1))];
Especifique el centro del mapa como el centro de la cuadrícula rectangular.
center = [sum(xLims)/2 sum(yLims)/2];
Cree un codificador de conjunto de puntos base utilizando el objeto bpsEncoder. Este objeto calcula los puntos base y los almacena en la propiedad Points.
bpsObj= bpsEncoder(arrangement,encodingSize,Center=center,Dimensions=dims); basisPoints = bpsObj.Points;
Codifique el entorno del mapa 2D de entrada utilizando la función encode.
[encodedValues,nearestPoint] = encode(bpsObj,map);
Muestra el mapa y los puntos base junto con los puntos de objeto más cercanos.
show(map) hold on scatter(basisPoints(:,1),basisPoints(:,2),"filled",DisplayName="Basis Points") quiver(basisPoints(:,1),basisPoints(:,2),nearestPoint(:,1)-basisPoints(:,1),... nearestPoint(:,2)-basisPoints(:,2),0,Color='black',DisplayName='Nearest points') legend(Location="bestoutside")
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, scatter, quiver. These objects represent Basis Points, Nearest points.](encode2dmapenvironmentusingbasispointsetsexample_01_es.png)
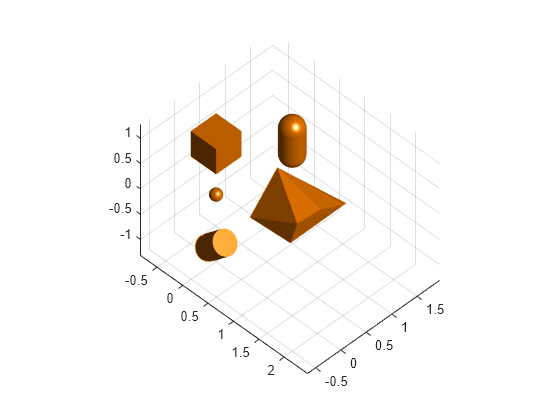
Cree un entorno 3D con obstáculos utilizando objetos de geometría de colisión como collisionBox.
center = [0 0 0]; sph1 = collisionSphere(.1); loc1 = [0 0 0] + center; sph1.Pose = se3([0 0 0],"eul","XYZ",loc1); mesh1 = collisionMesh(rand(10,3)); loc2 = [1 0 0] + center; mesh1.Pose = se3([pi/4 0 0],"eul","XYZ",loc2); box1 = collisionBox(.5,.5,.5); loc3 = [0 0 1] + center; box1.Pose = se3([0 0 0],"eul","XYZ",loc3); cylinder1 = collisionCylinder(.2,.5); loc4 = [0 0 -1] + center; cylinder1.Pose = se3([0 pi/4 0],"eul","XYZ",loc4); capsule1 = collisionCapsule(.2,.5); loc5 = [0 1.5 0] + center; capsule1.Pose = se3([0 0 pi/2],"eul","XYZ",loc5); simpleGeom = {sph1,mesh1,box1,cylinder1,capsule1};
Grafique el entorno en 3D.
figure light; grid on; axis("equal"); view(45,45); hold on; for i=1:length(simpleGeom) show(simpleGeom{i}); end
Convierte los objetos de geometría de colisión en una estructura de malla geométrica.
meshArray = geom2struct(simpleGeom);
Calcule el mapa del campo de distancia con signo truncado (TSDF) para obtener una representación basada en vóxeles del entorno 3D.
meshTSDFObj = meshtsdf(meshArray,FillInterior=true,Resolution=20)
meshTSDFObj =
meshtsdf with properties:
MeshID: [5×1 double]
NumMesh: 5
MapLimits: [2×3 double]
NumActiveVoxel: 14997
Resolution: 20
TruncationDistance: 0.1500
FillInterior: 1
Codifique el mapa TSDF utilizando el enfoque del conjunto de puntos base.
arrangement = "uniform-ball-3d";
encodingSize = 100;
bpsObj= bpsEncoder(arrangement,encodingSize,Center=[0 0 0],Radius=2);
basisPoints = bpsObj.Points;
[encoding, nearestPts] = encode(bpsObj,meshTSDFObj);Muestra los puntos base y los puntos de objeto más cercanos que representan los obstáculos en el entorno.
plot3(basisPoints(:,1),basisPoints(:,2),basisPoints(:,3),plannerLineSpec.state{:});
nearestSpec = plannerLineSpec.state(Color='#A2142F',MarkerFaceColor='#A2142F',MarkerEdgeColor='#A2142F');
plot3(nearestPts(:,1),nearestPts(:,2),nearestPts(:,3),nearestSpec{:});
quiver3(basisPoints(:,1),basisPoints(:,2),basisPoints(:,3),...
nearestPts(:,1)-basisPoints(:,1),nearestPts(:,2)-basisPoints(:,2),nearestPts(:,3)-basisPoints(:,3),0,Color='black');
legend('','','','','','Basis points','Nearest object points',Location="southoutside")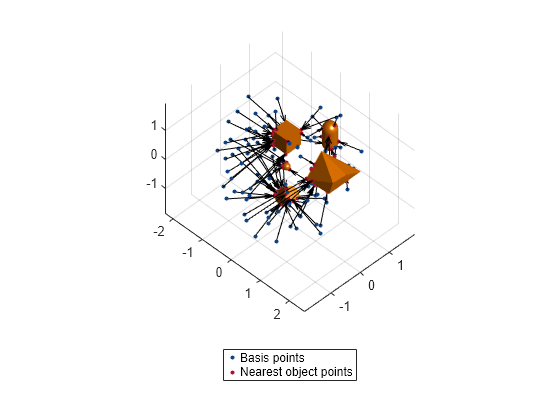
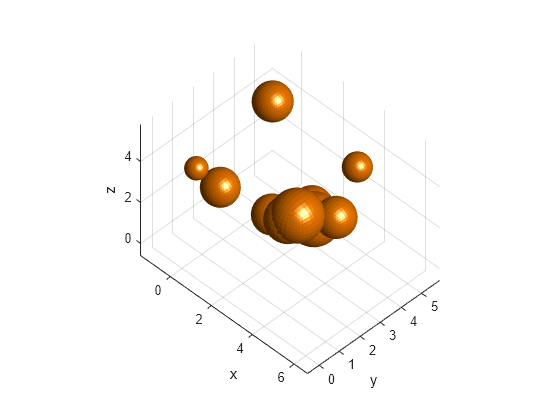
Crea un entorno aleatorio con obstáculos esféricos.
Especifique el número de obstáculos esféricos a agregar como 10. Establezca el rango para calcular aleatoriamente los valores de radio y posición de las esferas.
numSpheres = 10; radRange = [.2 1]; posRange = [0 5]; collisionSpheres = cell(1,numSpheres); spheres = zeros(4,numSpheres); for i=1:numSpheres % Compute radius randomRad = (radRange(2)-radRange(1))*rand(1) + radRange(1); % Compute position randomPos = arrayfun(@(~)(posRange(2)-posRange(1))*rand(1) + posRange(1),1:3); % Create random sphere sph = collisionSphere(randomRad); % Convert coordinates to homogeneous transformation matrix sph.Pose = trvec2tform(randomPos); % Obtain and store its 3D vertices collisionSpheres{i} = sph; % Store its radius and position values spheres(:,i) = [randomRad;randomPos']; end
Muestra el entorno que contiene obstáculos esféricos utilizando una función auxiliar.
figure hold on; helperDisplay(collisionSpheres); xlabel("x") ylabel("y") zlabel("z") hold off
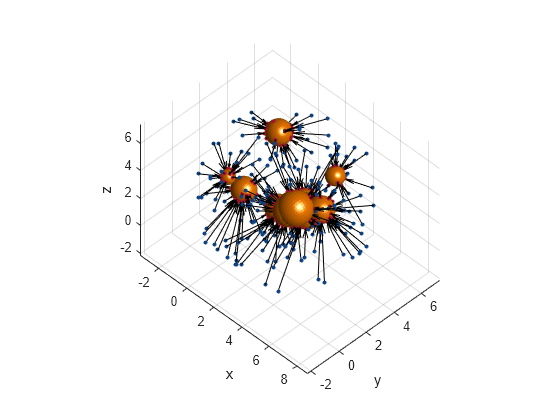
Cree un objeto codificador de conjunto de puntos base para una disposición "uniform-ball-3d" especificando el tamaño de codificación, el radio y el centro.
bpsObj = bpsEncoder("uniform-ball-3d",200,Radius=5,Center=[2.5 2.5 2.5]);Codificar el entorno.
[encoding,nearestPoint] = encode(bpsObj,spheres);
Mostrar resultados.
figure hold on; helperDisplay(collisionSpheres); basis = bpsObj.Points; plot3(basis(:,1), basis(:,2),basis(:,3), plannerLineSpec.state{:}, DisplayName='Basis Points') nearestSpec = plannerLineSpec.state(Color='#A2142F', MarkerFaceColor='#A2142F', MarkerEdgeColor='#A2142F'); plot3(nearestPoint(:,1), nearestPoint(:,2), nearestPoint(:,3), nearestSpec{:}, DisplayName="nearest obstacles"); quiver3(basis(:,1), basis(:,2),basis(:,3), nearestPoint(:,1)-basis(:,1), ... nearestPoint(:,2)-basis(:,2), nearestPoint(:,3)-basis(:,3),0, Color='black') xlabel("x") ylabel("y") zlabel("z") hold off
Función auxiliar para visualizar el entorno
function helperDisplay(collisionSpheres) light; grid on; axis("equal"); view(45,45); hold on; numSpheres = width(collisionSpheres); for i=1:numSpheres % Show mesh show(collisionSpheres{i}) end end
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2024a
Consulte también
bpsEncoder | mpnetSE2 | mpnetPrepareData | dlCHOMP (Robotics System Toolbox)