binaryOccupancyMap
Crear cuadrícula de ocupación con valores binarios
Descripción
binaryOccupancyMap crea un objeto de mapa de ocupación 2-D, que puede utilizar para representar y visualizar un espacio de trabajo de robot, incluidos los obstáculos. La integración de datos de sensores y estimaciones de posición crea una representación espacial de las ubicaciones aproximadas de los obstáculos.
Las cuadrículas de ocupación se utilizan en algoritmos robóticos como la planificación de rutas. También se utilizan en aplicaciones de mapeo, como para encontrar rutas libres de colisiones, evitar colisiones y calcular la localización. Puede modificar su cuadrícula de ocupación para adaptarla a su aplicación específica.
Cada celda en la cuadrícula de ocupación tiene un valor que representa el estado de ocupación de esa celda. Una ubicación ocupada se representa como true (1) y una ubicación libre se representa como false (0).
El objeto realiza un seguimiento de tres marcos de referencia: mundial, local y cuadrícula. El origen del marco mundial está definido por GridLocationInWorld, que define la esquina inferior izquierda del mapa en relación con el marco mundial. La propiedad LocalOriginInWorld especifica la ubicación del origen del marco local en relación con el marco mundial. La primera ubicación de la cuadrícula con índice (1,1) comienza en la esquina superior izquierda de la cuadrícula.
Nota
Este objeto anteriormente se llamaba robotics.BinaryOccupancyGrid.
Creación
Sintaxis
Descripción
map = binaryOccupancyMap crea una cuadrícula de ocupación binaria 2-D con un ancho y una altura de 10 m. La resolución de cuadrícula predeterminada es una celda por metro.
map = binaryOccupancyMap(rows,cols, crea una cuadrícula de ocupación binaria 2-D de tamaño (resolution,"grid")rows,cols).
map = binaryOccupancyMap( crea una cuadrícula a partir de los valores de la matriz p)p. El tamaño de la cuadrícula coincide con el tamaño de la matriz, y cada valor de celda se interpreta desde su ubicación en la matriz. p contiene cualquier tipo numérico o lógico con ceros (0) y unos (1).
map = binaryOccupancyMap( crea un mapa a partir de una matriz con la propiedad p,resolution)Resolution especificada en celdas por metro.
map = binaryOccupancyMap( crea un objeto utilizando valores de otro objeto sourcemap)binaryOccupancyMap.
map = binaryOccupancyMap( crea un objeto utilizando valores de otro objeto sourcemap,resolution)binaryOccupancyMap, pero remuestrea la matriz para tener la resolución especificada.
map = binaryOccupancyMap(___, establece propiedades utilizando uno o más argumentos de nombre-valor.Name=Value)
Argumentos de entrada
Propiedades
Funciones del objeto
copy | Crear copia del mapa de ocupación binario |
checkOccupancy | Consultar si las localidades están libres u ocupadas |
getOccupancy | Obtener valor de ocupación de ubicaciones |
grid2local | Convertir los índices de la cuadrícula en coordenadas locales |
grid2world | Convertir los índices de la cuadrícula en coordenadas del mundo real |
inflate | Agrandar cada ubicación ocupada |
insertRay | Insertar rayo de observación con escaneo láser. |
local2grid | Convertir coordenadas locales a índices de cuadrícula |
local2world | Convertir coordenadas locales a coordenadas mundiales |
move | Mover mapa en el marco mundial |
occupancyMatrix | Convierta una cuadrícula de ocupación en una matriz |
raycast | Calcular índices de celdas a lo largo de un rayo. |
rayIntersection | Encuentra puntos de intersección de rayos y celdas de mapa ocupadas. |
setOccupancy | Establecer el valor de ocupación de las ubicaciones |
show | Mostrar mapa de ocupación binario |
syncWith | Sincronizar mapa con mapa superpuesto |
world2grid | Convertir coordenadas mundiales a índices de cuadrícula |
world2local | Convertir coordenadas mundiales a coordenadas locales |
Ejemplos
Cree un mapa vacío de 10 m x 10 m.
map = binaryOccupancyMap(10,10,10);
Establezca la ocupación de las ubicaciones del mundo real y muestre el mapa.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; setOccupancy(map, [x y], ones(5,1)) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_01_es.png)
Agrande las ubicaciones ocupadas con un radio determinado.
inflate(map, 0.5) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_02_es.png)
Obtenga las ubicaciones de la cuadrícula a partir de las ubicaciones del mundo real.
ij = world2grid(map, [x y]);
Establezca las ubicaciones de la cuadrícula como ubicaciones libres.
setOccupancy(map, ij, zeros(5,1), 'grid')
figure
show(map)![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_03_es.png)
Este ejemplo muestra cómo convertir una imagen en una cuadrícula de ocupación binaria para usarla en mapeo y planificación de rutas.
Importar imagen.
image = imread('imageMap.png');Convierta a escala de grises y luego a imagen en blanco y negro según el valor de umbral dado.
grayimage = rgb2gray(image); bwimage = grayimage < 0.5;
Utilice una imagen en blanco y negro como entrada de matriz para la cuadrícula de ocupación binaria.
grid = binaryOccupancyMap(bwimage); show(grid)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](imagetobinaryoccupancygridexampleexample_01_es.png)
Este ejemplo muestra cómo convertir un archivo .pgm en un objeto binaryOccupancyMap para usar en MATLAB ®.
Importar imagen usando imread. La imagen es bastante grande y debe recortarse en el área correspondiente.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)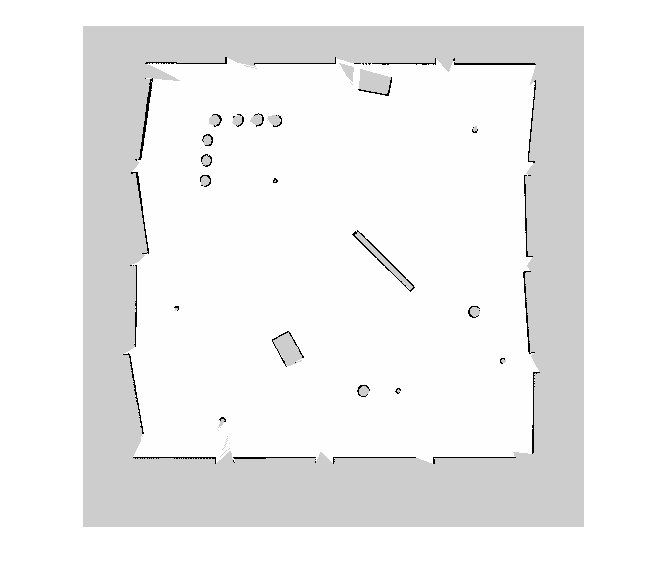
Las áreas desconocidas (grises) deben eliminarse y tratarse como espacio libre. Cree una matriz lógica basada en un umbral. Dependiendo de su imagen, este valor podría ser diferente. El espacio ocupado debe establecerse en 1 (blanco en la imagen).
imageBW = imageCropped < 100; imshow(imageBW)
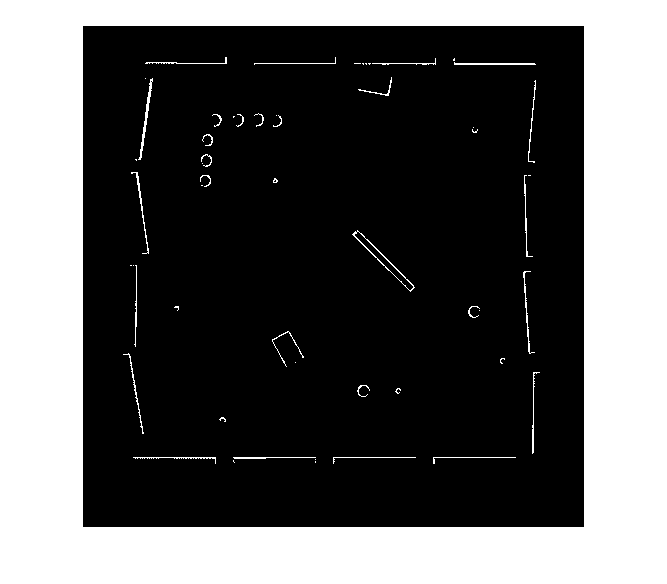
Crea un objeto binaryOccupancyMap utilizando la imagen del mapa ajustada.
map = binaryOccupancyMap(imageBW); show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](convertpgmimagetomapexample_03_es.png)