collisionCapsule
Descripción
El objeto collisionCapsule es una geometría de colisión primitiva de cápsula definida por un radio y una longitud, con el segmento de línea central de la cápsula alineado con su eje z y el origen del marco fijo del cuerpo ubicado en el punto medio del segmento de línea central.
Creación
Descripción
CAPS = collisionCapsule( crea una cápsula primitiva con el radio especificado radius,length)radius y la longitud length. Los argumentos radius y length establecen las propiedades Radius y Length, respectivamente.
CAPS = collisionCapsule(___,Pose= establece la propiedad pose)Pose de la cápsula en pose, relativa al marco mundial.
Propiedades
Funciones del objeto
checkCollision | Comprobar si dos geometrías están en colisión |
genspheres | Generar esferas a lo largo del segmento de la línea central de la cápsula. |
convertToCollisionMesh | Convierta la geometría primitiva de colisión en geometría de malla de colisión |
show | Muestre la geometría de colisión |
Ejemplos
Crea una cápsula de colisión con un radio de 2 y una longitud de 10. Visualice la cápsula.
cCapsule = collisionCapsule(2,10); [~,p] = show(cCapsule);
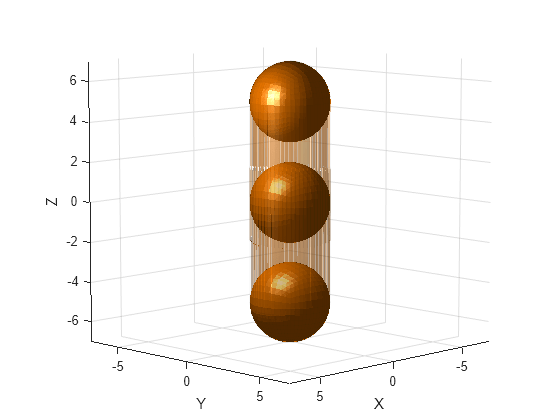
Genere esferas con proporciones 0.0, 0.5 y 1.0 de la longitud de la cápsula.
spheres = genspheres(cCapsule,linspace(0,1,3));
Muestra las posiciones de las esferas.
for i = 1:length(spheres) disp(tform2trvec(spheres{i}.Pose)) end
0 0 -5
0 0 0
0 0 5
Establezca los alfas de cara y borde de la cápsula en valores bajos. Esto asegura que ambas esferas sean visibles cuando las agregues a la figura.
p.FaceAlpha = 0.4;
p.EdgeAlpha = 0.01;
hold onMuestra las esferas generadas en la cápsula.
cellfun(@show,spheres);
Capacidades ampliadas
Historial de versiones
Introducido en R2022bConsulte también
Objetos
Funciones
checkCollision|fitCollisionCapsule|showCollisionArray(Robotics System Toolbox)