matchScansGrid
Estimar la pose entre dos escaneos LIDAR mediante búsqueda basada en cuadrículas
Sintaxis
Descripción
pose = matchScansGrid(currScan,refScan)lidarScan y un objeto actual lidarScan utilizando una búsqueda basada en cuadrícula. matchScansGrid convierte pares de escaneos LiDAR en cuadrículas probabilísticas y encuentra la pose entre los dos escaneos correlacionando sus cuadrículas. La función utiliza una estrategia de ramificación y límite para acelerar el cálculo en grandes ventanas de búsqueda discretizadas.
[___] = matchScansGrid(___,Name,Value) especifica opciones utilizando uno o más argumentos de par Name,Value. Por ejemplo, 'InitialPose',[1 1 pi/2] especifica una estimación de pose inicial para la coincidencia de escaneo.
Ejemplos
Realice una comparación de escaneos utilizando una búsqueda basada en cuadrículas para estimar la pose entre dos escaneos láser. Genere una cuadrícula probabilística a partir de los escaneos y estime la diferencia de pose de esas cuadrículas.
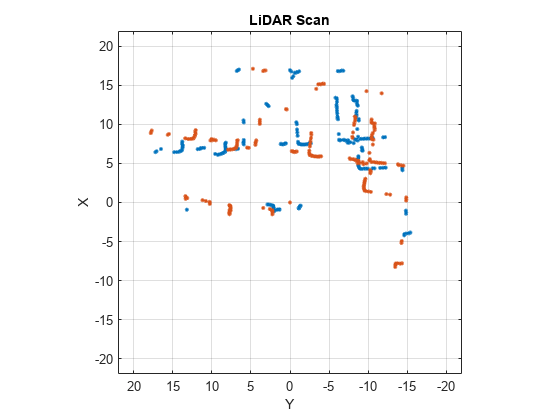
Cargue los datos del escaneo láser. Estos dos escaneos provienen de un sensor LiDAR real con cambios en la postura del robot y se almacenan como objetos lidarScan.
load laserScans.mat scan scan2 plot(scan) hold on plot(scan2) hold off
Utilice matchScansGrid para estimar la pose entre los dos escaneos.
relPose = matchScansGrid(scan2,scan);
Usando la pose estimada, transforme el escaneo actual al escaneo de referencia. Los escaneos se superponen estrechamente cuando los trazas juntos.
scan2Tformed = transformScan(scan2,relPose); plot(scan) hold on plot(scan2Tformed) hold off

Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Referencias
[1] Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor. "Real-Time Loop Closure in 2D LIDAR SLAM." 2016 IEEE International Conference on Robotics and Automation (ICRA). 2016.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b