Algoritmos de localización
Los algoritmos de localización, como la localización de Montecarlo y la comparación de escaneos, estiman su pose en un mapa conocido mediante sensores de distancia o lecturas de LiDAR. Los grafos de pose realizan un seguimiento de las poses estimadas y se pueden optimizar en base a las restricciones de los bordes y los cierres de bucles. Para localización y mapeo simultáneos, consulte SLAM.
Funciones
Temas
- Redacte una serie de escaneos láser con cambios de pose
Utilice la función
matchScanspara calcular la diferencia de pose entre una serie de escaneos láser. - Minimice el rango de búsqueda en la coincidencia de escaneo Lidar basada en cuadrícula usando IMU
Este ejemplo muestra cómo utilizar una unidad de medición inercial (IMU) para minimizar el rango de búsqueda del ángulo de rotación para algoritmos de coincidencia de escaneo.
- Algoritmo de localización de Montecarlo
El algoritmo de localización de Monte Carlo (MCL) se utiliza para estimar la posición y orientación de un robot.
- Flujo de trabajo del filtro de partículas
Un filtro de partículas es un estimador de estado bayesiano recursivo que utiliza partículas discretas para aproximar la distribución posterior del estado estimado.
- Parámetros del filtro de partículas
Para utilizar el filtro de partículas
stateEstimatorPF(Robotics System Toolbox), debe especificar parámetros como la cantidad de partículas, la ubicación inicial de las partículas y el método de estimación del estado.
Ejemplos destacados

Odometría visual-inercial monocular (VIO) mediante grafo de factores
Implementar odometría visual-inercial monocular para localizar un UAV utilizando datos de cámara e IMU, optimizados mediante un grafo de factores.
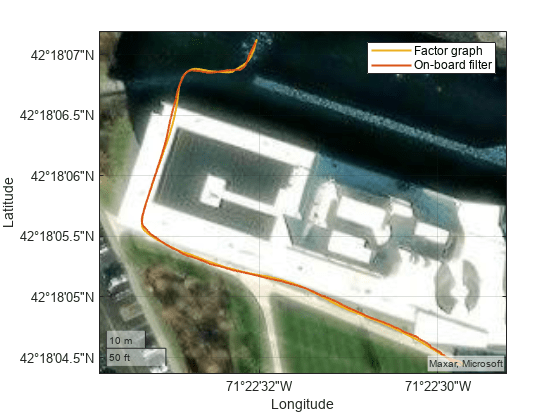
Localización de peatones basada en gráficos de factores con sensores IMU y GPS
Este ejemplo muestra cómo estimar la posición de un peatón utilizando datos de sensores registrados de una unidad de medición inercial (IMU) y un receptor del Sistema de posicionamiento global (GPS) y un gráfico de factores.

Mapee el área interior usando Lidar SLAM y gráfico de factores
Implemente SLAM lidar fuera de línea en escaneos lidar recopilados para mapear un área interior utilizando un gráfico de factores y un mapa de escaneo lidar.
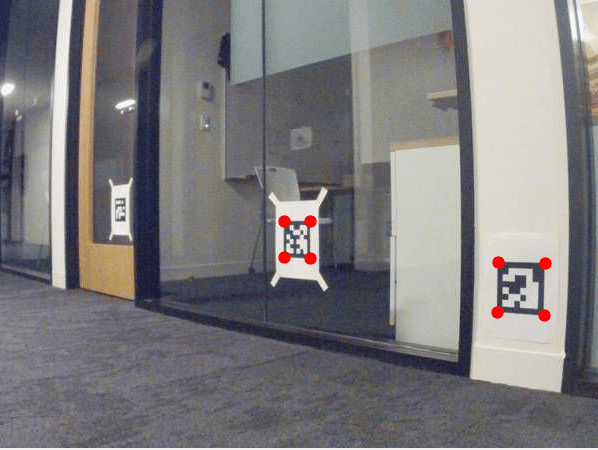
SLAM de punto de referencia usando marcadores AprilTag
Combine los datos de odometría del robot y los marcadores AprilTag para implementar SLAM con un gráfico de factores y un gráfico de pose, y compare los resultados.

Localice TurtleBot utilizando el algoritmo de localización Monte Carlo
Aplique el algoritmo de localización Monte Carlo en un robot TurtleBot® en un entorno Gazebo® simulado.

Reduzca la deriva en la trayectoria de odometría visual 3D mediante gráficos de pose
Este ejemplo muestra cómo reducir la desviación en la trayectoria estimada (ubicación y orientación) de una cámara monocular mediante la optimización del gráfico de pose 3D. La odometría visual estima la pose global actual de la cámara (cuadro actual). Debido a una mala coincidencia o errores en la triangulación de puntos tridimensionales, las trayectorias de los robots a menudo tienden a desviarse de ground-truth. La detección de cierre de bucle y la optimización del gráfico de pose reducen esta desviación y corrigen los errores.

Estimación de la transformación de cámara a IMU mediante calibración extrínseca
Utilice la calibración extrínseca para estimar la transformación SE(3) de la cámara a la IMU para los flujos de trabajo VINS.