plannerControlRRT
Descripción
El objeto plannerControlRRT es un planificador de árbol aleatorio de exploración rápida (RRT) para resolver problemas de planificación cinemáticos y dinámicos (kinodynamic) mediante controles. El algoritmo RRT es una rutina de planificación de movimiento basada en árboles que hace crecer incrementalmente un árbol de búsqueda. En los planificadores cinemáticos, el árbol crece muestreando aleatoriamente estados en el espacio de configuración del sistema y luego intenta propagar el nodo más cercano hacia ese estado. El propagador de estado toma muestras de controles para alcanzar el estado según el modelo cinemático y las políticas de control. A medida que el árbol agrega nodos, los estados muestreados abarcan el espacio de búsqueda y eventualmente conectan los estados inicial y objetivo.
Estos son los pasos del algoritmo RRT basado en control:
El planificador,
plannerControlRRT, solicita un estado del espacio de estados.Planner encuentra el estado más cercano en el árbol de búsqueda según el coste.
El propagador de estado,
mobileRobotPropagator, muestrea comandos de control y duraciones para propagarse hacia el estado objetivo.El propagador de estado se propaga hacia el estado objetivo.
Si el propagador devuelve una trayectoria válida al estado, agregue el estado al árbol.
Opcional: Intente dirigir la trayectoria hacia el objetivo final basándose en las propiedades NumGoalExtension y GoalBias.
Continúe buscando hasta que el árbol de búsqueda alcance el objetivo o satisfaga otros criterios de salida.
La ventaja de un planificador cinemático como plannerControlRRT es que garantiza que devolverá una secuencia de estados, controles y referencias que comprenden una ruta cinemática o dinámicamente factible. El inconveniente de un planificador cinemático es que las propagaciones cinemáticas no pueden garantizar que los nuevos estados sean exactamente iguales a los estados objetivo a menos que exista una representación analítica para una secuencia de controles que impulsen el sistema entre dos configuraciones con cero error residual. Esto significa que los planificadores cinemáticos suelen ser asintóticamente completos y garantizan la viabilidad cinemática, pero a menudo no pueden garantizar la optimización asintótica.
Creación
Sintaxis
Descripción
controlPlanner = plannerControlRRT(propagator)StatePropagator.
controlPlanner = plannerControlRRT(propagator,Name=Value)plannerControlRRT(propagator,ContinueAfterGoalReached=1) continúa buscando caminos alternativos después de que el árbol llega por primera vez al objetivo.
Propiedades
Funciones del objeto
Ejemplos
Planifique rutas de control para un modelo cinemático de bicicleta con el objeto mobileRobotPropagator. Especifique un mapa para el entorno, establezca límites estatales y defina una ubicación de inicio y objetivo. Planifique una ruta utilizando el algoritmo RRT basado en control, que utiliza un propagador de estado para planificar el movimiento y los comandos de control necesarios.
Establecer parámetros de estado y propagador de estado
Cargue una matriz de mapa ternario y cree un objeto occupancyMap. Cree el propagador de estado usando el mapa. De forma predeterminada, el propagador de estado utiliza un modelo cinemático de bicicleta.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Establezca los límites estatales en el espacio de estados según los límites del mundo del mapa.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Planificar ruta
Cree el planificador de ruta a partir del propagador de estado.
planner = plannerControlRRT(propagator);
Especifique los estados de inicio y objetivo.
start = [10 15 0]; goal = [40 30 0];
Planificar una ruta entre los estados. Para obtener resultados repetibles, reinicie el generador de números aleatorios antes de planificar. La función plan genera un objeto navPathControl, que contiene los estados, los comandos de control y las duraciones.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1×1 mobileRobotPropagator]
States: [192×3 double]
Controls: [191×2 double]
Durations: [191×1 double]
TargetStates: [191×3 double]
NumStates: 192
NumSegments: 191
Visualizar resultados
Visualice el mapa y trace los estados de la ruta.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](plankinodynamicpathwithcontrolsformobilerobotexample_01_es.png)
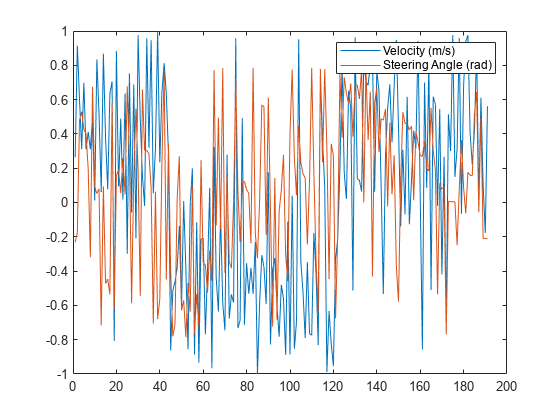
Muestra las entradas de control [v psi] de velocidad de avance y ángulo de dirección.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Referencias
[1] S.M. Lavalle, J.J. Kuffner, "Randomized kinodynamic planning", International Journal of Robotics Research, vol. 20, no. 5, pp. 378-400, May 2001
[2] Kavraki, L. and S. LaValle. "Chapter 5 Motion Planning", 1st ed., B. Siciliano et O. Khatib, Ed. New York: Springer-Verlag Berlin Heidelberg, 2008, pp. 109-131.
Capacidades ampliadas
Historial de versiones
Introducido en R2021b