show
Trazar gráfico de pose
Descripción
show( especifica opciones utilizando el par de argumentos poseGraph,Name,Value)Name,Value. Por ejemplo, 'IDs','on' traza todos los identificadores de nodos y bordes del gráfico de pose.
axes = show(___)
Ejemplos
Optimice un gráfico de pose en función de los nodos y las restricciones de los bordes. El gráfico de pose utilizado en este ejemplo proviene del Conjunto de datos de Intel Research Lab y se generó a partir de la recopilación de información de la odometría de las ruedas y de un sensor de telémetro láser en un laboratorio interior.
Cargue el conjunto de datos Intel® que contiene un gráfico de pose 2-D. Inspeccione el objeto poseGraph para ver la cantidad de nodos y cierres de bucle.
load intel-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 1228
NumEdges: 1483
NumLoopClosureEdges: 256
LoopClosureEdgeIDs: [1228 1229 1230 1231 1232 1233 1234 1235 1236 1237 1238 1239 1240 1241 1242 1243 1244 1245 1246 1247 1248 1249 1250 1251 1252 1253 1254 1255 1256 1257 1258 1259 1260 1261 1262 1263 1264 1265 1266 1267 1268 1269 … ] (1×256 double)
LandmarkNodeIDs: [1×0 double]
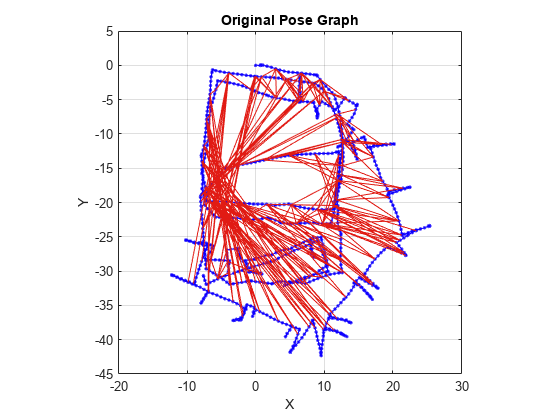
Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos.
show(pg,'IDs','off'); title('Original Pose Graph')
Optimiza el gráfico de pose. Los nodos se ajustan en función de las restricciones de los bordes y los cierres de bucles. Trace el gráfico de pose optimizado para ver el ajuste de los nodos con cierres de bucle.
updatedPG = optimizePoseGraph(pg); figure show(updatedPG,'IDs','off'); title('Updated Pose Graph')

Optimice un gráfico de pose en función de los nodos y las restricciones de los bordes. El gráfico de pose utilizado en este ejemplo se tomó del MIT Dataset y se generó utilizando información extraída de un estacionamiento.
Cargue el gráfico de pose del conjunto de datos del MIT. Inspeccione el objeto poseGraph3D para ver la cantidad de nodos y cierres de bucle.
load parking-garage-posegraph.mat pg disp(pg);
poseGraph3D with properties:
NumNodes: 1661
NumEdges: 6275
NumLoopClosureEdges: 4615
LoopClosureEdgeIDs: [128 129 130 132 133 134 135 137 138 139 140 142 143 144 146 147 148 150 151 204 205 207 208 209 211 212 213 215 216 217 218 220 221 222 223 225 226 227 228 230 231 232 233 235 236 237 238 240 241 242 243 244 … ] (1×4615 double)
LandmarkNodeIDs: [1×0 double]
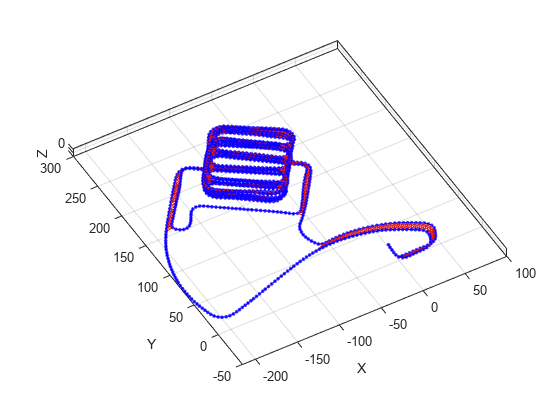
Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos.
title('Original Pose Graph') show(pg,'IDs','off'); view(-30,45)
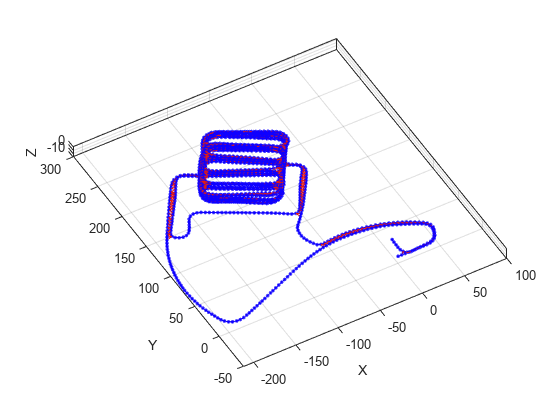
Optimiza el gráfico de pose. Los nodos se ajustan en función de las restricciones de los bordes y los cierres de bucles. Trace el gráfico de pose optimizado para ver el ajuste de los nodos con cierres de bucle.
updatedPG = optimizePoseGraph(pg); figure title('Updated Pose Graph') show(updatedPG,'IDs','off'); view(-30,45)
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Historial de versiones
Introducido en R2019b