poseGraph3D
Crear gráfico de pose en 3D
Descripción
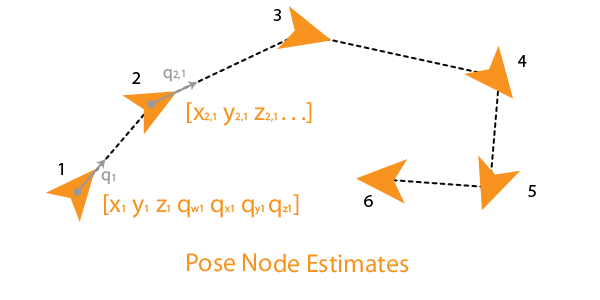
Un objeto poseGraph3D almacena información para una representación gráfica de pose en 3D. Un gráfico de pose contiene nodos conectados por aristas. La estimación de cada nodo está conectada al gráfico mediante restricciones de borde que definen la pose relativa entre los nodos y la incertidumbre en esa medición.
Para construir un gráfico de pose de forma iterativa, utilice la función addRelativePose para agregar estimaciones de pose relativas y conectarlas a un nodo existente con restricciones de borde especificadas. Los nodos de pose deben especificarse en relación con un nodo de pose. Especificar la incertidumbre de la medición mediante una matriz de información.
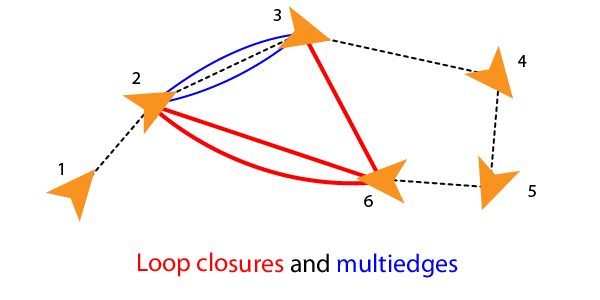
Agregar un borde entre dos nodos no secuenciales crea un cierre de bucle en el gráfico. También se admiten múltiples bordes o multibordes entre pares de nodos, lo que incluye cierres de bucle. Para agregar restricciones de borde adicionales o cierres de bucle, especifique los ID de nodo utilizando la función addRelativePose. Al optimizar el gráfico de pose, la función optimizePoseGraph encuentra una solución para satisfacer todas estas restricciones de borde.
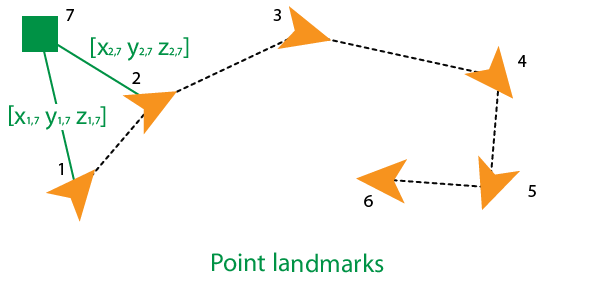
Para agregar nodos de puntos de referencia, utilice la función addPointLandmark. Esta función especifica los nodos como puntos xyz sin estimaciones de orientación. Los puntos de referencia deben especificarse en relación con un nodo de pose.
Para gráficos de poses en 2D, consulte poseGraph.
Para ver un ejemplo que crea y optimiza un gráfico de pose 3D a partir de datos de sensores del mundo real, consulte SLAM de punto de referencia usando marcadores AprilTag.
Creación
Sintaxis
Descripción
poseGraph = poseGraph3D crea un objeto gráfico de pose en 3D. Agregue poses usando addRelativePose para construir un gráfico de poses de forma iterativa.
poseGraph = poseGraph3D('MaxNumEdges',maxEdges,'MaxNumNodes',maxNodes) especifica un límite superior en la cantidad de bordes y nodos permitidos en el gráfico de pose al generar código. Este límite solo es necesario al generar código.
Propiedades
Funciones del objeto
addPointLandmark | Agregar un nodo de punto de referencia al gráfico de pose |
addRelativePose | Agregar pose relativa al gráfico de pose |
copy | Crear copia del gráfico de pose |
edgeNodePairs | Pares de nodos de borde en gráfico de pose |
edgeConstraints | Restricciones de borde en el gráfico de pose |
edgeResidualErrors | Calcular los errores residuales del borde del gráfico de pose |
findEdgeID | Encuentra el ID del borde del borde |
nodeEstimates | Poses de nodos en el gráfico de poses. |
removeEdges | Eliminar los bordes de cierre del bucle del gráfico |
show | Trazar gráfico de pose |
Ejemplos
Optimice un gráfico de pose en función de los nodos y las restricciones de los bordes. El gráfico de pose utilizado en este ejemplo se tomó del MIT Dataset y se generó utilizando información extraída de un estacionamiento.
Cargue el gráfico de pose del conjunto de datos del MIT. Inspeccione el objeto poseGraph3D para ver la cantidad de nodos y cierres de bucle.
load parking-garage-posegraph.mat pg disp(pg);
poseGraph3D with properties:
NumNodes: 1661
NumEdges: 6275
NumLoopClosureEdges: 4615
LoopClosureEdgeIDs: [128 129 130 132 133 134 135 137 138 139 140 142 143 144 146 147 148 150 151 204 205 207 208 209 211 212 213 215 216 217 218 220 221 222 223 225 226 227 228 230 231 232 233 235 236 237 238 240 241 242 243 244 … ] (1×4615 double)
LandmarkNodeIDs: [1×0 double]
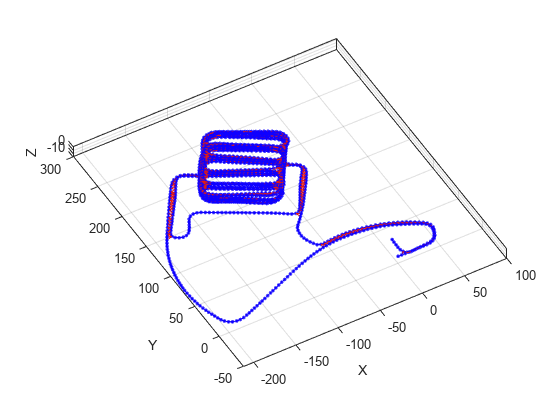
Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos.
title('Original Pose Graph') show(pg,'IDs','off'); view(-30,45)
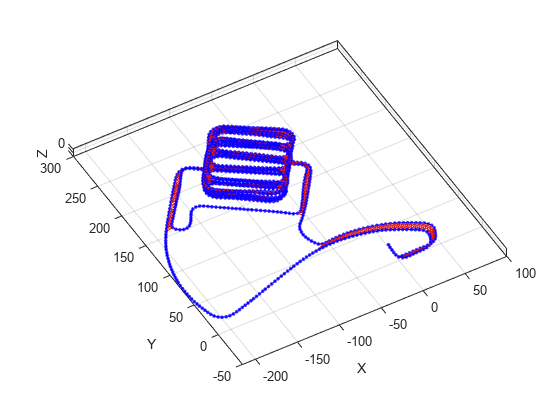
Optimiza el gráfico de pose. Los nodos se ajustan en función de las restricciones de los bordes y los cierres de bucles. Trace el gráfico de pose optimizado para ver el ajuste de los nodos con cierres de bucle.
updatedPG = optimizePoseGraph(pg); figure title('Updated Pose Graph') show(updatedPG,'IDs','off'); view(-30,45)
Referencias
[1] Carlone, Luca, Roberto Tron, Kostas Daniilidis, and Frank Dellaert. "Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization." 2015 IEEE International Conference on Robotics and Automation (ICRA). 2015, pp. 4597–4604.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b