eulerd
Convertir un cuaternión en ángulos de Euler en grados
Descripción
eulerAngles = eulerd(quat,rotationSequence,rotationType)quat, en una matriz de ángulos de Euler de N por 3 en grados.
Ejemplos
Argumentos de entrada
Cuaternión que se va a convertir a ángulos de Euler, especificado como un objeto quaternion o un arreglo de objetos quaternion de cualquier dimensionalidad.
Secuencia de rotación de la representación de ángulos de Euler, especificada como uno de estos valores.
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
La secuencia de rotación define el orden de las rotaciones sobre los ejes. Por ejemplo, si especifica una secuencia de rotación de "YZX":
La primera rotación es sobre el eje y.
La segunda rotación es sobre el nuevo eje z.
La tercera rotación es sobre el nuevo eje x.
Tipos de datos: char | string
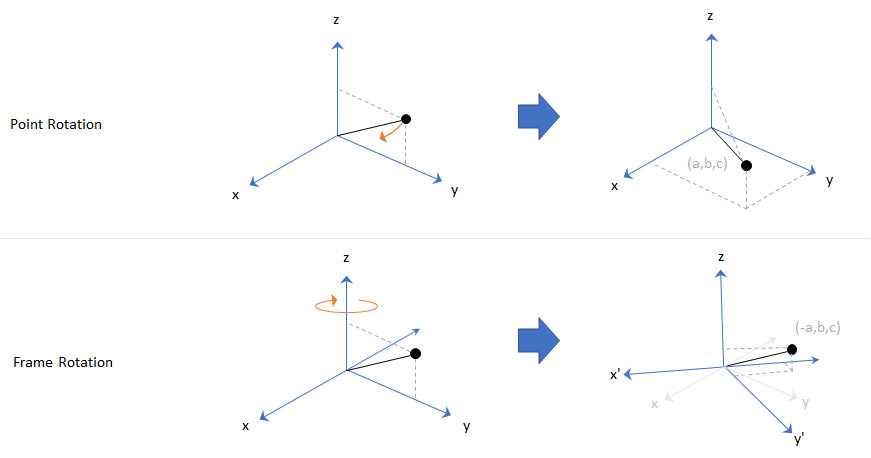
Tipo de rotación, especificado como "point" o "frame".
En una rotación de puntos, el marco es estático y el punto se mueve. En una rotación de marcos, el punto es estático y el marco se mueve. La rotación de puntos y la rotación de marcos definen desplazamientos angulares equivalentes, pero en direcciones opuestas.
Tipos de datos: char | string
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2019b