lookupPose
Obtener información de pose durante un tiempo determinado.
Descripción
[ devuelve la información de la posición de la trayectoria del punto de referencia en los tiempos de muestra especificados. Si algún tiempo de muestra excede la duración de la trayectoria, la información de pose correspondiente se devuelve como position,orientation,velocity,acceleration,angularVelocity] = lookupPose(traj,sampleTimes)NaN.
Ejemplos
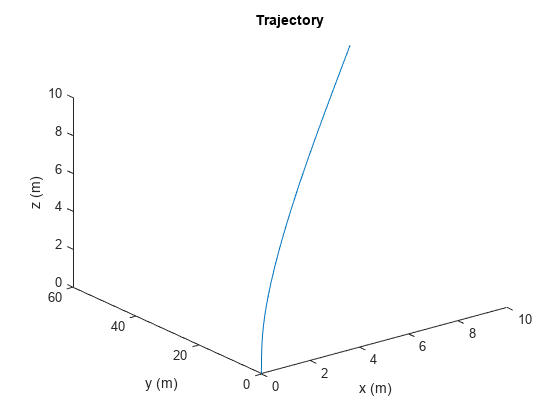
Crea un objeto waypointTrajectory que conecta dos puntos de referencia. La velocidad de la trayectoria en los dos puntos de referencia es 0 y 10 , respectivamente. Restrinja el límite de sacudida a 0,5 para habilitar el perfil de aceleración trapezoidal.
waypoints = [0 0 0;
10 50 10];
speeds = [0 10];
jerkLimit = 0.5;
trajectory = waypointTrajectory(waypoints,GroundSpeed=speeds,JerkLimit=jerkLimit);Obtenga el tiempo inicial y el tiempo final de la trayectoria consultando la propiedad TimeOfArrival. Cree marcas de tiempo para muestrear la trayectoria.
t0 = trajectory.TimeOfArrival(1); tf = trajectory.TimeOfArrival(end); sampleTimes = linspace(t0,tf,100);
Obtenga la información de posición, velocidad y aceleración en estas marcas de tiempo muestreadas utilizando la función de objeto lookupPose.
[position,~,velocity,acceleration,~] = lookupPose(trajectory,sampleTimes);
Trazar la trayectoria.
figure() plot3(position(:,1),position(:,2),position(:,3)) xlabel("x (m)") ylabel("y (m)") zlabel("z (m)") title("Trajectory")
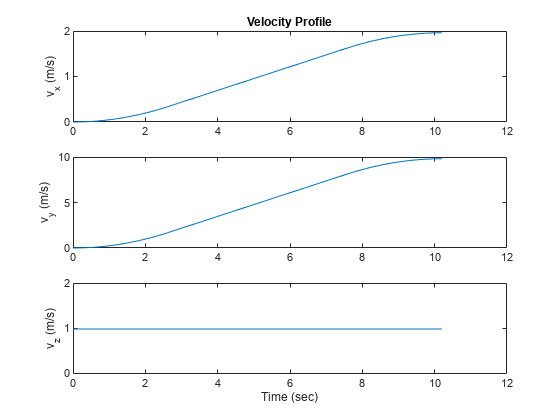
Trazar el perfil de velocidad.
figure() subplot(3,1,1) plot(sampleTimes,velocity(:,1)); ylabel("v_x (m/s)") title("Velocity Profile") subplot(3,1,2) plot(sampleTimes,velocity(:,2)); ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,velocity(:,3)); ylabel("v_z (m/s)") xlabel("Time (sec)")
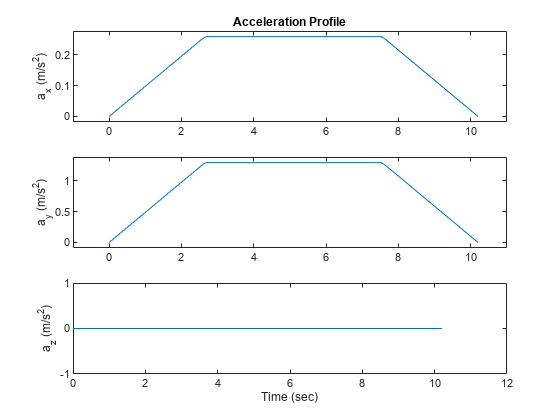
Trazar el perfil de aceleración. De los resultados se desprende que el perfil de aceleración del movimiento plano es trapezoidal.
figure() subplot(3,1,1) plot(sampleTimes,acceleration(:,1)); axis padded ylabel("a_x (m/s^2)") title("Acceleration Profile") subplot(3,1,2) plot(sampleTimes,acceleration(:,2)); ylabel("a_y (m/s^2)") axis padded subplot(3,1,3) plot(sampleTimes,acceleration(:,3)); ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2019b