cubicpolytraj
Genere trayectorias polinomiales de tercer orden
Sintaxis
Descripción
[ genera un polinomio de tercer orden que alcanza un determinado conjunto de waypoints de entrada con los puntos de tiempo correspondientes. La función genera las posiciones, velocidades y aceleraciones en las muestras de tiempo dadas, q,qd,qdd,pp] = cubicpolytraj(wayPoints,timePoints,tSamples)tSamples. También devuelve la forma polinomial por tramos pp de la trayectoria polinomial con relación al tiempo.
[ especifica parámetros adicionales como argumentos de par q,qd,qdd,pp] = cubicpolytraj(___,Name,Value)Name,Value utilizando cualquier combinación de las sintaxis anteriores.
Ejemplos
Utilice la función cubicpolytraj con un conjunto determinado de waypoints xy en 2D. También se proporcionan puntos de tiempo para los waypoints.
wpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = 0:5;
Especifique un vector de tiempo para el muestreo de la trayectoria. Realice el muestreo con un intervalo menor que los puntos de tiempo especificados.
tvec = 0:0.01:5;
Calcule la trayectoria cúbica. La función genera las posiciones de la trayectoria (q), la velocidad (qd), la aceleración (qdd) y los coeficientes polinomiales (pp) del polinomio cúbico.
[q,qd,qdd,pp] = cubicpolytraj(wpts,tpts,tvec);
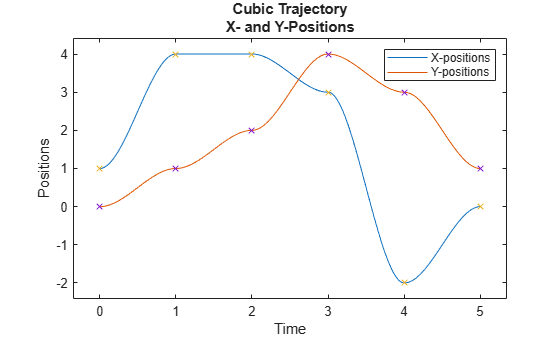
Represente las trayectorias cúbicas de las posiciones x e y. Compare la trayectoria con cada waypoint.
plot(tvec,q) hold on plot(tpts,wpts,"x") xlabel("Time") ylabel("Positions") legend("X-positions","Y-positions")'
ans =
Legend (X-positions, Y-positions) with properties:
String: {'X-positions' 'Y-positions'}
Location: 'northeast'
Orientation: 'vertical'
FontSize: 9
Position: [0.6891 0.8011 0.1975 0.0931]
Units: 'normalized'
Show all properties
title(["Cubic Trajectory","X- and Y-Positions"]) axis padded hold off
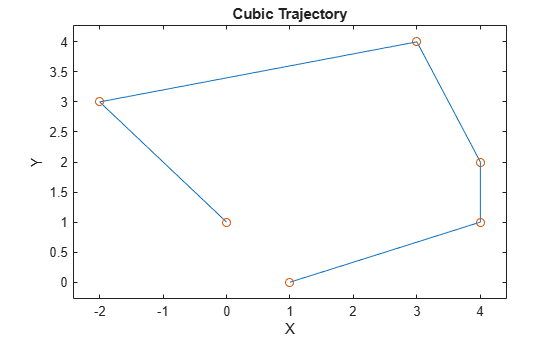
También puede verificar las posiciones reales en el plano 2D. Represente las diferentes filas del vector q y los waypoints como las posiciones x e *y.
figure plot(q(1,:),q(2,:)) hold on scatter(wpts(1,:),wpts(2,:)) xlabel("X") ylabel("Y") title("Cubic Trajectory") axis padded
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2019a
Consulte también
bsplinepolytraj | contopptraj | quinticpolytraj | rottraj | transformtraj | trapveltraj