unicycleKinematics
Modelo de vehículo monociclo
Descripción
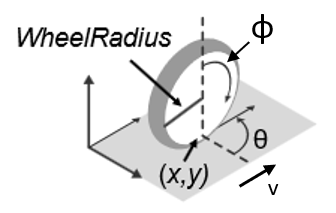
unicycleKinematics crea un modelo de vehículo monociclo para simular dinámicas de vehículo tipo automóvil simplificadas. El estado del vehículo se define como un vector de tres elementos, [x y theta], con la posición global xy especificada en metros, y el ángulo del rumbo del vehículo, theta, especificado en radianes. Este modelo se aproxima a un vehículo monociclo con un determinado radio de la rueda, WheelRadius, que puede girar en su posición según un ángulo de rumbo, theta. Para calcular los estados de las derivadas de tiempo del modelo, use la función derivative con comandos de entrada y el estado actual del robot.
Creación
Descripción
kinematicModel = unicycleKinematics
kinematicModel = unicycleKinematics(Name,Value)
Propiedades
Funciones del objeto
derivative | Derivada de tiempo del estado del vehículo |
Ejemplos
Crear un robot
Defina un robot y establezca la posición de partida inicial y la orientación.
kinematicModel = unicycleKinematics; initialState = [0 0 0];
Simular el movimiento del robot
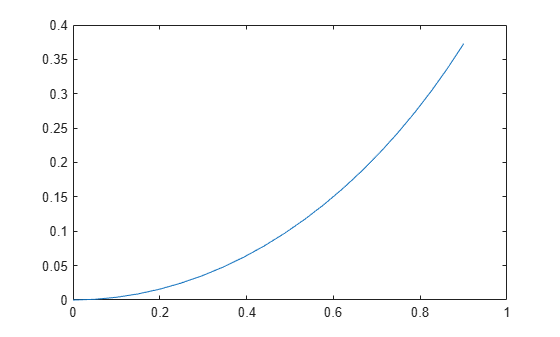
Establezca el periodo de tiempo de la simulación en 1 s con unidades de tiempo de 0.05 s, los comandos de entrada en una velocidad de las ruedas de 10 rad/s y una velocidad angular de rumbo de pi/4 rad/s para hacer un giro a la izquierda. Simule el movimiento del robot utilizando el solver ode45 en la función derivative.
tspan = 0:0.05:1;
inputs = [10 pi/4]; %Constant speed and turning left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Representar la trayectoria
figure plot(y(:,1),y(:,2))
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.