besself
Diseño de filtros analógicos de Bessel
Descripción
[ devuelve los coeficientes de la función de transferencia de un filtro analógico de Bessel de paso bajo de orden b,a] = besself(n,Wo)n, donde Wo es la frecuencia angular hasta la cual el retardo de grupo del filtro es aproximadamente constante. Los valores más grandes de n producen un retardo de grupo que se aproxima mejor a una constante hasta Wo. La función besself no admite el diseño de filtros digitales de Bessel.
Ejemplos
Diseñe un filtro analógico de Bessel de paso bajo de quinto orden con un retardo de grupo casi constante hasta rad/segundo. Represente las respuestas de magnitud y fase del filtro con freqs.
wc = 10000; [b,a] = besself(5,wc); freqs(b,a)

Calcule la respuesta de retardo de grupo del filtro como el negativo de la derivada de la respuesta de fase no envuelta. Represente el retardo de grupo para verificar que sea casi constante hasta la frecuencia de corte.
[h,w] = freqs(b,a); grpdel = -diff(unwrap(angle(h)))./diff(w); clf loglog(w(2:end),grpdel) xlabel("Frequency (rad/s)") ylabel("Group delay (s)") xline(wc) grid on

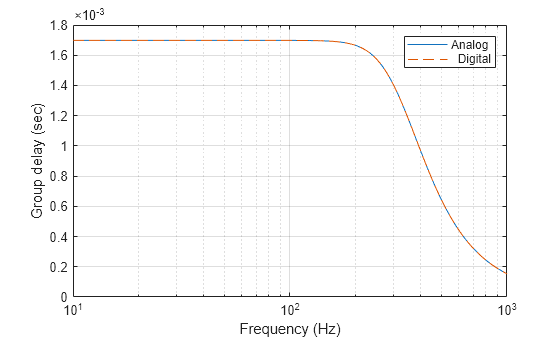
Diseñe un filtro IIR digital de cuarto orden con un retardo de grupo casi constante a partir de su filtro analógico equivalente.
Diseñe un filtro analógico de Bessel de paso bajo de cuarto orden con una frecuencia de corte de 300 Hz.
[b,a] = besself(4,2*pi*300);
Utilice el método de invariancia de impulso para convertir un filtro analógico en uno digital. La tasa de muestreo es 1000 Hz.
Fs = 10000; [bd,ad] = impinvar(b,a,Fs);
Calcule la respuesta en frecuencia y el retardo de grupo de los filtros de Bessel analógicos y digitales. Especifique 2048 puntos de frecuencia distribuidos geométricamente entre 1 Hz y 1 kHz. Represente las respuestas del retardo de grupo. Ambos diseños producen el mismo resultado.
f = logspace(1,3,2048); HfAnalog = freqs(b,a,2*pi*f); HfDigital = freqz(bd,ad,2*pi*f/Fs); gdAnalog = -diff(unwrap(angle(HfAnalog)))./diff(2*pi*f); gdDigital = -diff(unwrap(angle(HfDigital)))./diff(2*pi*f); semilogx(f(2:end),gdAnalog,"-",f(2:end),gdDigital,"--") xlabel("Frequency (Hz)") ylabel("Group delay (sec)") legend(["Analog"," Digital"]) grid on
Diseñe un filtro analógico Butterworth paso bajo de quinto orden con una frecuencia de corte de 2 GHz. Multiplique por para convertir la frecuencia en radianes por segundo. Calcule la respuesta en frecuencia del filtro en 4096 puntos.
n = 5;
wc = 2*pi*2e9;
w = 2*pi*1e9*logspace(-2,1,4096)';
[zb,pb,kb] = butter(n,wc,"s");
[bb,ab] = zp2tf(zb,pb,kb);
[hb,wb] = freqs(bb,ab,w);
gdb = -diff(unwrap(angle(hb)))./diff(wb);Diseñe un filtro Chebyshev tipo I de quinto orden con la misma frecuencia de borde y 3 dB de ondulación de la banda de paso. Calcule su respuesta en frecuencia.
[z1,p1,k1] = cheby1(n,3,wc,"s");
[b1,a1] = zp2tf(z1,p1,k1);
[h1,w1] = freqs(b1,a1,w);
gd1 = -diff(unwrap(angle(h1)))./diff(w1);Diseñe un filtro Chebyshev tipo II de quinto orden con la misma frecuencia de borde y 30 dB de atenuación de la banda de parada. Calcule su respuesta en frecuencia.
[z2,p2,k2] = cheby2(n,30,wc,"s");
[b2,a2] = zp2tf(z2,p2,k2);
[h2,w2] = freqs(b2,a2,w);
gd2 = -diff(unwrap(angle(h2)))./diff(w2);Diseñe un filtro elíptico de quinto orden con la misma frecuencia de borde, 3 dB de ondulación de la banda de paso y 30 dB de atenuación de la banda de parada. Calcule su respuesta en frecuencia.
[ze,pe,ke] = ellip(n,3,30,wc,"s");
[be,ae] = zp2tf(ze,pe,ke);
[he,we] = freqs(be,ae,w);
gde = -diff(unwrap(angle(he)))./diff(we);Diseñe un filtro de Bessel de quinto orden con la misma frecuencia de borde. Calcule su respuesta en frecuencia.
[zf,pf,kf] = besself(n,wc); [bf,af] = zp2tf(zf,pf,kf); [hf,wf] = freqs(bf,af,w); gdf = -diff(unwrap(angle(hf)))./diff(wf);
Represente la atenuación en decibelios. Exprese la frecuencia en gigahercios. Compare los filtros.
fGHz = [wb w1 w2 we wf]/(2e9*pi); plot(fGHz,mag2db(abs([hb h1 h2 he hf]))) axis([0 5 -45 5]) grid on xlabel("Frequency (GHz)") ylabel("Attenuation (dB)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"])

Represente el retardo de grupo en las muestras. Exprese la frecuencia en gigahercios y el retardo de grupo en nanosegundos. Compare los filtros.
gdns = [gdb gd1 gd2 gde gdf]*1e9; gdns(gdns<0) = NaN; loglog(fGHz(2:end,:),gdns) grid on xlabel("Frequency (GHz)") ylabel("Group delay (ns)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"])

Los filtros Butterworth y Chebyshev Tipo II tienen bandas de paso planas y bandas de transición anchas. Los filtros Chebyshev de tipo I y elíptico se desinflan más rápido pero tienen ondulaciones en la banda de paso. La entrada de frecuencia a la función de diseño Chebyshev Tipo II establece el comienzo de la banda de parada en lugar del final de la banda de paso. El filtro de Bessel tiene un retardo de grupo aproximadamente constante a lo largo de la banda de paso.
Argumentos de entrada
Argumentos de salida
Algoritmos
besself diseña filtros de Bessel analógicos, que se caracterizan por un retardo de grupo casi constante en toda la banda de paso, lo que preserva la forma de onda de las señales filtradas en la banda de paso.
Los filtros de Bessel de paso bajo tienen una respuesta de magnitud monótona decreciente, al igual que los filtros de Butterworth de paso bajo. En comparación con los filtros Butterworth, Chebyshev y elípticos, el filtro de Bessel tiene el rolloff más lento y requiere el orden más alto para cumplir una especificación de atenuación.
En los filtros de orden alto, el formato de espacio de estados es el más preciso numéricamente, seguido por el formato cero-polo-ganancia. El formato del coeficiente de la función de transferencia es el menos preciso; pueden surgir problemas numéricos en órdenes de filtro tan bajos como 15.
besself utiliza un algoritmo de cuatro pasos:
Encuentra los polos, ceros y ganancia del prototipo analógico de paso bajo con la función
besselap.Convierte los polos, los ceros y la ganancia en un formato de espacio de estados.
Usa la función
lp2lppara convertir el prototipo de filtro de paso bajo de tiempo continuo y espacio de estados en un filtro de paso bajo con la frecuencia de corte especificada.Convierte el filtro de espacio de estados de nuevo en una función de transferencia o en un formato cero-polo-ganancia, según sea necesario.
Referencias
[1] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
Historial de versiones
Introducido antes de R2006a