cheby2
Diseño de filtros Chebyshev Tipo II
Sintaxis
Descripción
[ diseña un filtro digital Chebyshev tipo II paso bajo de b,a] = cheby2(n,Rs,Ws)n-ésimo orden con una frecuencia normalizada de borde de banda de parada de Ws y Rs decibelios de atenuación de la banda de parada desde el valor pico de la banda de paso. La función cheby2 devuelve los coeficientes de numerador y denominador de la función de transferencia del filtro.
[ diseña un filtro digital Chebyshev tipo II paso bajo, paso alto, paso banda o eliminador de banda, dependiendo del valor de b,a] = cheby2(n,Rs,Ws,fType)fType y del número de elementos de Ws. Los diseños de paso banda y de eliminador de banda resultantes son de orden 2n.
Nota
Es posible que encuentre inestabilidades numéricas al diseñar filtros IIR con funciones de transferencia para órdenes tan bajos como 4. Consulte Funciones de transferencia y CTF para obtener más información sobre las cuestiones numéricas que afectan a la formación de la función de transferencia.
[ diseña un filtro digital Chebyshev tipo II y devuelve sus ceros, polos y ganancia. Esta sintaxis puede incluir cualquiera de los argumentos de entrada de las sintaxis anteriores.z,p,k] = cheby2(___)
[___] = cheby2(___,"s") diseña un filtro analógico Chebyshev tipo II utilizando cualquiera de los argumentos de entrada o salida de las sintaxis anteriores.
[ diseña un filtro digital Chebyshev tipo II paso bajo utilizando Funciones de transferencia en cascada (CTF) de segundo orden. La función devuelve matrices que listan los coeficientes de polinomios de numerador y denominador de la función de transferencia del filtro, representada como una cascada de secciones de filtro. Este enfoque genera filtros IIR con una estabilidad numérica mejorada en comparación con las funciones de transferencia de una sola sección. (desde R2024b)B,A] = cheby2(n,Rs,Ws,"ctf")
[___] = cheby2( diseña un filtro digital Chebyshev tipo II paso bajo, paso alto, paso banda o eliminador de banda, y devuelve la representación del filtro utilizando el formato CTF. Las secciones de diseño resultantes son de orden 2 (filtros paso bajo y paso alto) o 4 (filtros paso banda o eliminador de banda). (desde R2024b)n,Rs,Ws,fType,"ctf")
[___, también devuelve la ganancia general del sistema. Es necesario especificar gS] = cheby2(___)"ctf" para devolver gS. (desde R2024b)
Ejemplos
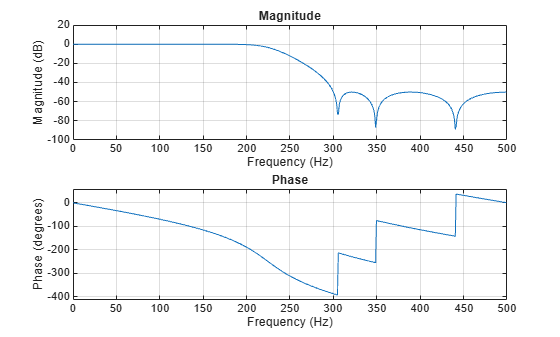
Diseñe un filtro Chebyshev Tipo II paso bajo de 6.º orden con 50 dB de atenuación de banda de parada y una frecuencia de borde de banda de parada de 300 Hz, que, para datos muestreados a 1000 Hz, corresponde a rad/muestra. Represente sus respuestas de magnitud y fase. Utilícelo para filtrar una señal aleatoria de 1000 muestras.
fc = 300; fs = 1000; [b,a] = cheby2(6,50,fc/(fs/2)); freqz(b,a,[],fs) subplot(2,1,1) ylim([-100 20])
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
Diseñe un filtro Chebyshev Tipo II eliminador de banda de 6.º orden con frecuencias de borde normalizadas de y rad/muestra y 50 dB de atenuación de banda de parada. Represente sus respuestas de magnitud y fase. Utilícelo para filtrar datos aleatorios.
[b,a] = cheby2(3,50,[0.2 0.6],'stop');
freqz(b,a)
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
Diseñe un filtro Chebyshev Tipo II paso alto de 9.º orden con 20 dB de atenuación de banda de parada y una frecuencia de borde de banda de parada de 300 Hz, que, para datos muestreados a 1000 Hz, corresponde a rad/muestra. Convierta los ceros, los polos y la ganancia en secciones de segundo orden. Represente las respuestas de magnitud y fase.
[z,p,k] = cheby2(9,20,300/500,"high");
sos = zp2sos(z,p,k);
freqz(sos)
subplot(2,1,1)
ylim([-60 10])
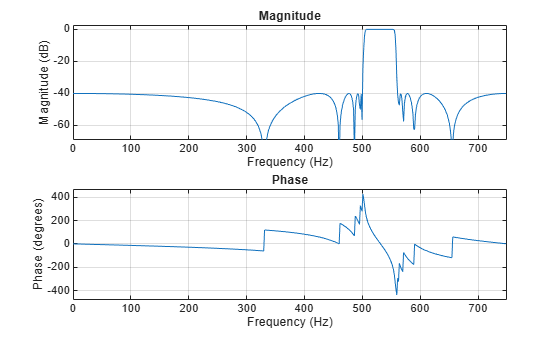
Diseñe un filtro Chebyshev Tipo II paso banda de 20.º orden con una frecuencia de la banda de parada inferior de 500 Hz y una frecuencia de banda de parada superior de 560 Hz. Especifique una atenuación de la banda de parada de 40 dB y una tasa de muestreo de 1500 Hz. Utilice la representación del espacio de estados.
fs = 1500; [A,B,C,D] = cheby2(10,40,[500 560]/(fs/2));
Convierta la representación del espacio de estados en secciones de segundo orden. Visualice las respuestas en frecuencia.
sos = ss2sos(A,B,C,D); freqz(sos,[],fs)
Diseñe un filtro idéntico utilizando designfilt. Visualice las respuestas en frecuencia.
d = designfilt("bandpassiir",FilterOrder=20, ... StopbandFrequency1=500,StopbandFrequency2=560, ... StopbandAttenuation=40,SampleRate=fs); freqz(d,[],fs)

Diseñe un filtro analógico Butterworth paso bajo de quinto orden con una frecuencia de corte de 2 GHz. Multiplique por para convertir la frecuencia en radianes por segundo. Calcule la respuesta en frecuencia del filtro en 4096 puntos.
n = 5;
wc = 2*pi*2e9;
w = 2*pi*1e9*logspace(-2,1,4096)';
[zb,pb,kb] = butter(n,wc,"s");
[bb,ab] = zp2tf(zb,pb,kb);
[hb,wb] = freqs(bb,ab,w);
gdb = -diff(unwrap(angle(hb)))./diff(wb);Diseñe un filtro Chebyshev tipo I de quinto orden con la misma frecuencia de borde y 3 dB de ondulación de la banda de paso. Calcule su respuesta en frecuencia.
[z1,p1,k1] = cheby1(n,3,wc,"s");
[b1,a1] = zp2tf(z1,p1,k1);
[h1,w1] = freqs(b1,a1,w);
gd1 = -diff(unwrap(angle(h1)))./diff(w1);Diseñe un filtro Chebyshev tipo II de quinto orden con la misma frecuencia de borde y 30 dB de atenuación de la banda de parada. Calcule su respuesta en frecuencia.
[z2,p2,k2] = cheby2(n,30,wc,"s");
[b2,a2] = zp2tf(z2,p2,k2);
[h2,w2] = freqs(b2,a2,w);
gd2 = -diff(unwrap(angle(h2)))./diff(w2);Diseñe un filtro elíptico de quinto orden con la misma frecuencia de borde, 3 dB de ondulación de la banda de paso y 30 dB de atenuación de la banda de parada. Calcule su respuesta en frecuencia.
[ze,pe,ke] = ellip(n,3,30,wc,"s");
[be,ae] = zp2tf(ze,pe,ke);
[he,we] = freqs(be,ae,w);
gde = -diff(unwrap(angle(he)))./diff(we);Diseñe un filtro de Bessel de quinto orden con la misma frecuencia de borde. Calcule su respuesta en frecuencia.
[zf,pf,kf] = besself(n,wc); [bf,af] = zp2tf(zf,pf,kf); [hf,wf] = freqs(bf,af,w); gdf = -diff(unwrap(angle(hf)))./diff(wf);
Represente la atenuación en decibelios. Exprese la frecuencia en gigahercios. Compare los filtros.
fGHz = [wb w1 w2 we wf]/(2e9*pi); plot(fGHz,mag2db(abs([hb h1 h2 he hf]))) axis([0 5 -45 5]) grid on xlabel("Frequency (GHz)") ylabel("Attenuation (dB)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"])

Represente el retardo de grupo en las muestras. Exprese la frecuencia en gigahercios y el retardo de grupo en nanosegundos. Compare los filtros.
gdns = [gdb gd1 gd2 gde gdf]*1e9; gdns(gdns<0) = NaN; loglog(fGHz(2:end,:),gdns) grid on xlabel("Frequency (GHz)") ylabel("Group delay (ns)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"])

Los filtros Butterworth y Chebyshev Tipo II tienen bandas de paso planas y bandas de transición anchas. Los filtros Chebyshev de tipo I y elíptico se desinflan más rápido pero tienen ondulaciones en la banda de paso. La entrada de frecuencia a la función de diseño Chebyshev Tipo II establece el comienzo de la banda de parada en lugar del final de la banda de paso. El filtro de Bessel tiene un retardo de grupo aproximadamente constante a lo largo de la banda de paso.
Diseñe un filtro Chebyshev tipo II paso alto de noveno orden con una frecuencia de corte de 300 Hz y una tasa de muestreo de 1000 Hz. La atenuación de la banda de parada es de 40 dB. Devuelva los coeficientes del sistema de filtro como una cascada de secciones de segundo orden.
Wn = 300/(1000/2); [B,A] = cheby2(9,40,Wn,"high","ctf")
B = 5×3
0.5196 -0.5196 0
0.5196 -0.6621 0.5196
0.5196 -0.1266 0.5196
0.5196 0.1806 0.5196
0.5196 0.3066 0.5196
A = 5×3
1.0000 -0.0765 0
1.0000 -0.0238 0.0967
1.0000 0.2707 0.3142
1.0000 0.5763 0.5726
1.0000 0.8128 0.8461
Represente la respuesta de magnitud del filtro.
filterAnalyzer(B,A)

Argumentos de entrada
Argumentos de salida
Más acerca de
Inestabilidad numérica de la sintaxis de la función de transferencia
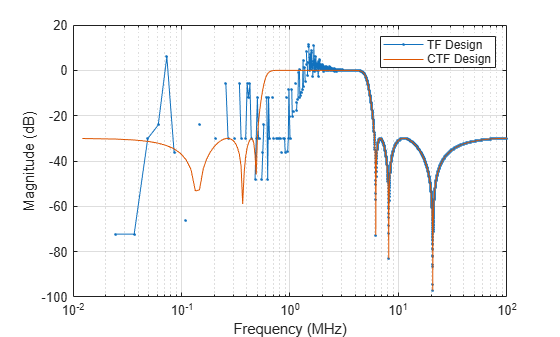
En general, utilice funciones de transferencia en cascada (sintaxis "ctf") para diseñar filtros IIR digitales. Si diseña el filtro utilizando funciones de transferencia en cascada (cualquiera de las sintaxis [b,a]), es posible que encuentre inestabilidades numéricas. Estas inestabilidades se deben a errores de redondeo y pueden ocurrir para un orden n tan bajo como 4. Este ejemplo ilustra esta limitación.
n = 6; Rs = 30; Fs = 200e6; Wn = [0.5e6 6e6]/(Fs/2); ftype = "bandpass"; % Transfer Function (TF) design [b,a] = cheby2(n,Rs,Wn,ftype); % This is an unstable filter % CTF design [B,A] = cheby2(n,Rs,Wn,ftype,"ctf"); % Compare frequency responses [hTF,f] = freqz(b,a,8192,Fs); hCTF = freqz(B,A,8192,Fs); semilogx(f/1e6,db(hTF),".-",f/1e6,db(hCTF)) grid on legend(["TF Design" "CTF Design"]) xlabel("Frequency (MHz)") ylabel("Magnitude (dB)")
Algoritmos
Los filtros Chebyshev Tipo II son monotónicos en la banda de paso y equiripple en la banda de parada. Los filtros de tipo II no se desinflan tan rápido como los filtros de tipo I, pero no presentan ondulación de la banda de paso.
cheby2 utiliza un algoritmo de cinco pasos:
Encuentra los polos, ceros y ganancia del prototipo analógico de paso bajo utilizando la función
cheb2ap.Convierte los polos, los ceros y la ganancia en una forma de espacio de estados.
Si es necesario, utiliza una transformación del espacio de estados para convertir el filtro paso bajo en un filtro paso banda, paso alto o eliminador de banda con las restricciones de frecuencia deseadas.
Para el diseño de filtros digitales, utiliza
bilinearpara convertir el filtro analógico en un filtro digital a través de una transformación bilineal con preconfiguración de frecuencia. Un cuidadoso ajuste de la frecuencia permite que los filtros analógicos y los digitales tengan la misma magnitud de respuesta en frecuencia enWsow1yw2.Convierte el filtro de espacio de estados de nuevo en una función de transferencia o en un formato cero-polo-ganancia, según sea necesario.
Referencias
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.