detect
Syntax
Description
bboxes = detect(detector,I)I, using an
RTMDet object detector, detector. The detect
function returns the locations of detected objects in the input image as a set of bounding
boxes.
Note
This functionality requires Deep Learning Toolbox™ and the Computer Vision Toolbox™ Model for RTMDet Object Detection. You can install the Computer Vision Toolbox Model for RTMDet Object Detection from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
detectionResults = detect(detector,ds)ds.
[___] = detect(___,
detects objects within the rectangular region of interest roi)roi, in
addition to any combination of arguments from previous syntaxes.
[___] = detect(___,
specifies options using one or more name-value arguments. For example,
Name=Value)Threshold=0.5 specifies a detection threshold of 0.5.
Examples
Specify the name of a pretrained RTMDet deep learning network.
modelname = "medium-network-coco";Create an RTMDet object detector by using the pretrained RTMDet network.
detector = rtmdetObjectDetector(modelname);
Read a test image into the workspace, and detect objects in it by using the pretrained RTMDet object detector with a Threshold value of 0.55.
img = imread("boats.png");
[bboxes,scores,labels] = detect(detector,img,Threshold=0.55);Display the bounding boxes and predicted class labels of the detected objects.
detectedImg = insertObjectAnnotation(img,"rectangle",bboxes,labels);
figure
imshow(detectedImg)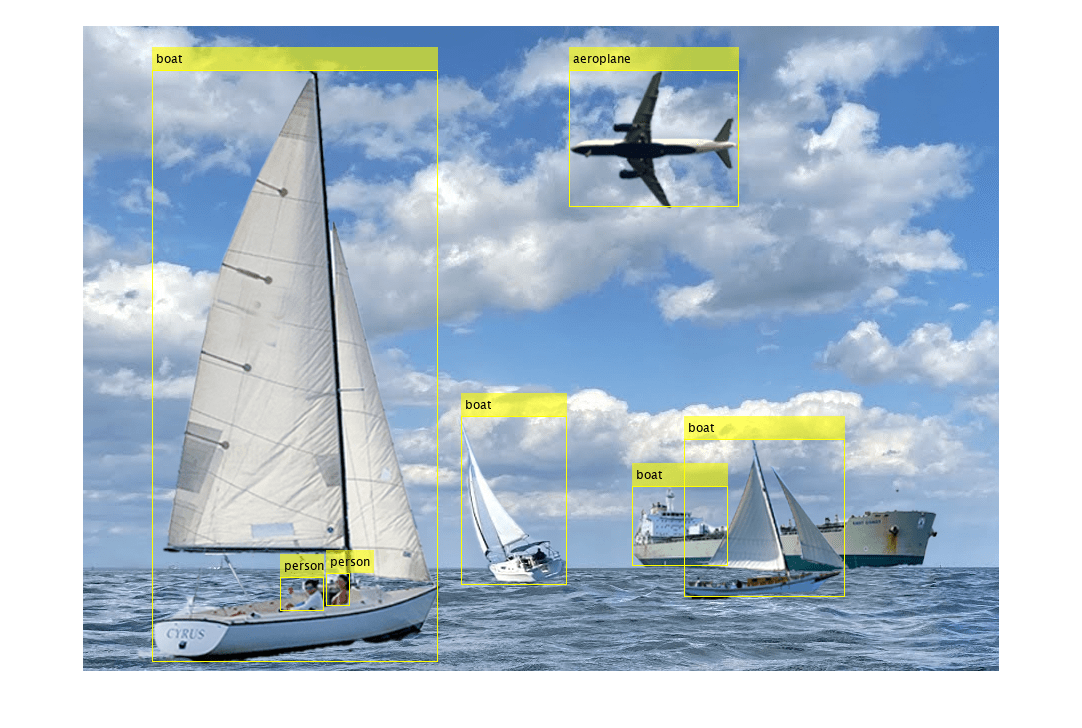
Load a pretrained RTMDet object detector.
detector = rtmdetObjectDetector("tiny-network-coco");Read the test datastore, and store it as an image datastore object.
location = fullfile(matlabroot,"toolbox","vision","visiondata","stopSignImages"); imds = imageDatastore(location);
Detect objects in the test datastore. Set the Threshold value to 0.6 and MiniBatchSize value to 16.
detectionResults = detect(detector,imds,Threshold=0.6,MiniBatchSize=16);
Read an image from the test data set, and extract the corresponding detection results.
num = 4;
I = readimage(imds,num);
bboxes = detectionResults.Boxes{num};
labels = detectionResults.Labels{num};
scores = detectionResults.Scores{num};Display the table of detection results.
results = table(bboxes,labels,scores)
results=7×3 table
189.3022 171.7018 40.2153 90.0829 traffic light 0.7034
1 470.0854 99.5766 103.3941 car 0.6517
439.7054 486.3765 128.5373 63.7707 car 0.7572
758.2266 502.1126 122.3475 63.5290 car 0.7175
1.4764e+03 498.0511 100.5210 63.9980 car 0.6535
395.7627 207.2426 30.0126 76.8816 traffic light 0.6713
53.3276 727.1694 1.5507e+03 180.0476 car 0.6140
Display the bounding boxes and predicted class labels of the detected objects in the image selected from the test datastore.
detectedImg = insertObjectAnnotation(I,"rectangle",bboxes,labels);
figure
imshow(detectedImg)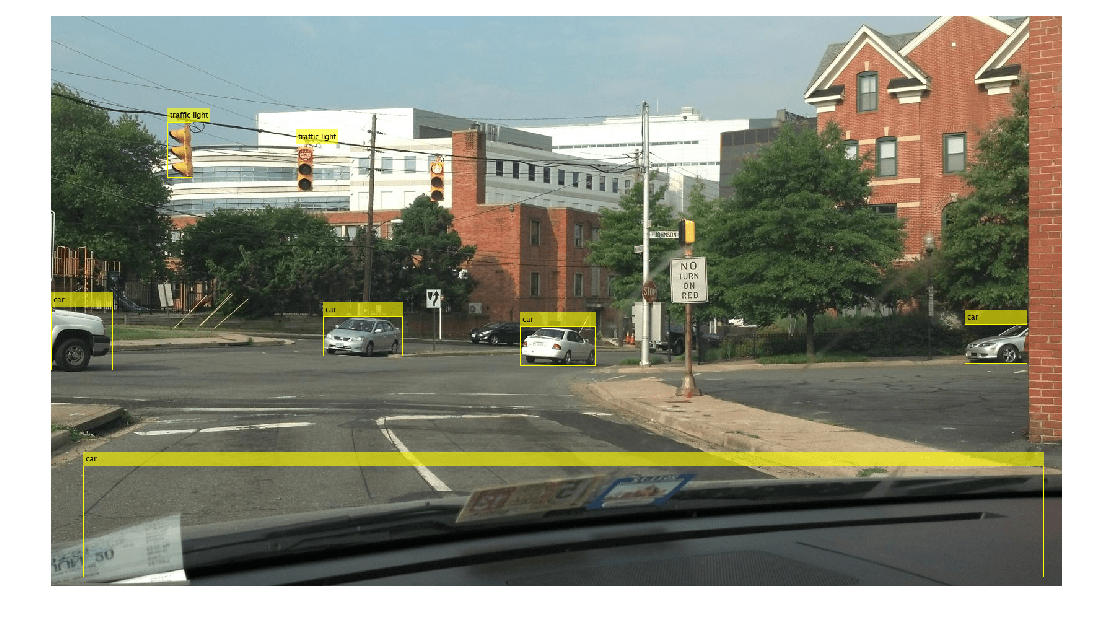
Load a pretrained RTMDet object detector.
detector = rtmdetObjectDetector("large-network-coco");Read a test image.
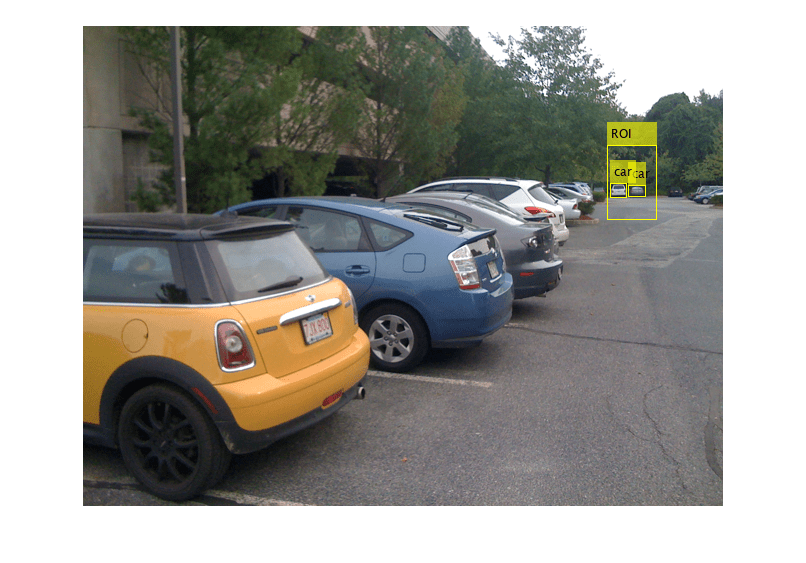
img = imread("parkinglot_left.png");Specify a rectangular region of interest (ROI) within the test image.
roiBox = [525 120 50 75];
Detect objects within the specified ROI.
[bboxes,scores,labels] = detect(detector,img,roiBox);
Display the bounding boxes and corresponding class labels of the detected objects within the ROI.
img = insertObjectAnnotation(img,"rectangle",roiBox,"ROI",AnnotationColor="yellow"); detectedImg = insertObjectAnnotation(img,"rectangle",bboxes,labels); figure imshow(detectedImg)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2024b