nyquistplot
Plot Nyquist response of dynamic system
Description
The nyquistplot function plots the Nyquist response of a dynamic system
model and returns a
NyquistPlot chart object. To customize the plot, modify the properties of
the chart object using dot notation. For more information, see Customize Linear Analysis Plots at Command Line.
To obtain Nyquist response data, use the nyquist function.
Creation
Syntax
Description
np = nyquistplot(sys)sys and
returns the corresponding chart object.
If sys is a multi-input, multi-output (MIMO) model, then the
nyquistplot function creates a grid of Nyquist plots with each plot
displaying the frequency response of one input-output pair.
np = nyquistplot(___,plotoptions)plotoptions. Settings you specify in
plotoptions override the plotting preferences for the current
MATLAB® session. This syntax is useful when you want to write a script to generate
multiple plots that look the same regardless of the local preferences.
np = nyquistplot(parent,___)Figure or TiledChartLayout, and sets the
Parent property. Use this syntax when you want to create a plot
in a specified open figure or when creating apps in App Designer.
Input Arguments
Properties
Object Functions
addResponse | Add dynamic system response to existing response plot |
showConfidence (System Identification Toolbox) | Display confidence regions on response plots for identified models |
zoomcp | Zoom Nyquist plot to region around critical point |
Examples
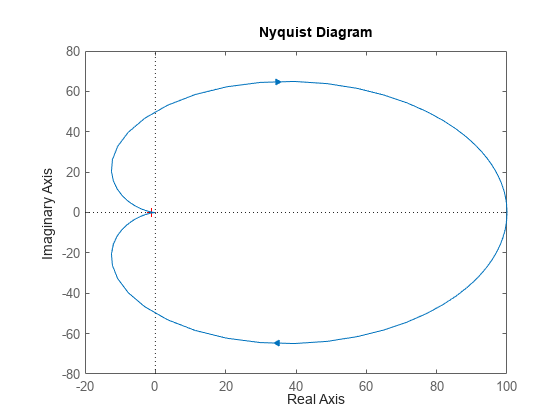
For this example, use the plot handle to change the phase units to radians and to turn the grid on.
Generate a random state-space model with 5 states and create the Nyquist diagram with chart object np.
rng("default")
sys = rss(5);
np = nyquistplot(sys);
Change the phase units to radians and turn on the grid. To do so, edit properties of the chart object.
np.PhaseUnit = "rad"; grid on;

The Nyquist plot automatically updates when you modify the chart object.
Alternatively, you can also use the nyquistoptions command to specify the required plot options. First, create an options set based on the toolbox preferences.
plotoptions = nyquistoptions("cstprefs");Change properties of the options set by setting the phase units to radians and enabling the grid.
plotoptions.PhaseUnits = "rad"; plotoptions.Grid = "on"; nyquistplot(sys,plotoptions);

Depending on your own toolbox preferences, the plot you obtain might look different from this plot. Only the properties that you set explicitly, in this example PhaseUnits and Grid, override the toolbox preferences.
Create a Nyquist plot of a dynamic system model and create the corresponding chart object.
sys = tf(100,[1,2,1]); np = nyquistplot(sys);
Change the text of the plot title.
np.Title.String = "Nyquist Plot of sys";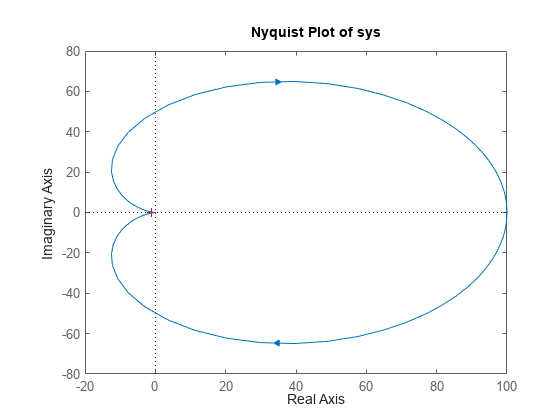
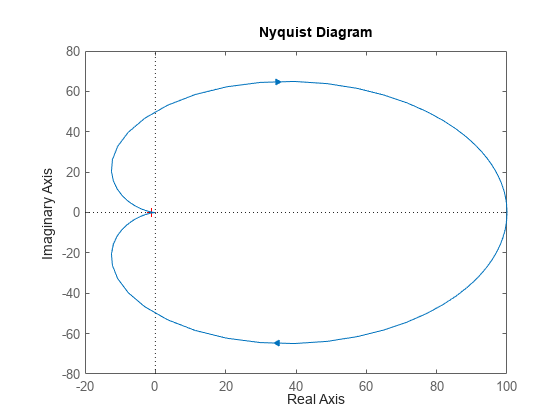
Plot the Nyquist frequency response of a dynamic system. Assign a variable name to the plot handle so that you can access it for further manipulation.
sys = tf(100,[1,2,1]); h = nyquistplot(sys);
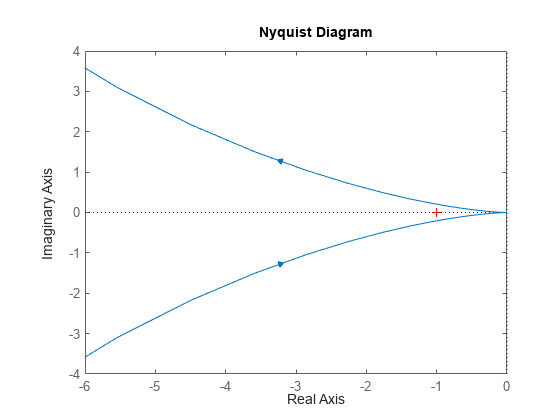
Zoom in on the critical point, (–1,0). You can do so interactively by right-clicking on the plot and selecting Zoom on (-1,0). Alternatively, use the zoomcp command on the plot handle h.
zoomcp(h)
Compare the frequency responses of identified state-space models of order 2 and 6 along with their 1-std confidence regions rendered at every 50th frequency sample.
Load the identified model data and estimate the state-space models using n4sid. Then, plot the Nyquist diagram.
load iddata1
sys1 = n4sid(z1,2);
sys2 = n4sid(z1,6);
w = linspace(10,10*pi,256);
np = nyquistplot(sys1,sys2,w);
Both models produce about 76% fit to data. However, sys2 shows higher uncertainty in its frequency response, especially close to Nyquist frequency as shown by the plot. To see this, show the confidence region at a subset of the points at which the Nyquist response is displayed.
np.ShowNegativeFrequencies = "off"; np.Characteristics.ConfidenceRegion.DisplaySampling = 50; np.Characteristics.ConfidenceRegion.Visible = "on";

Alternatively, to turn on the confidence region display, right-click the plot and select Characteristics > Confidence Region.
For this example, consider a MIMO state-space model with 3 inputs, 3 outputs and 3 states. Create a Nyquist plot, display only the partial contour.
Create the MIMO state-space model sys_mimo.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys_mimo = ss(A,B,C,D); size(sys_mimo)
State-space model with 3 outputs, 3 inputs, and 3 states.
Create a Nyquist plot with chart object np.
np = nyquistplot(sys_mimo);

Suppress the negative frequency data from the plot.
np.ShowNegativeFrequencies = "off";
The Nyquist plot automatically updates when you modify the chart object. For MIMO models, nyquistplot produces an array of Nyquist diagrams, each plot displaying the frequency response of one I/O pair.
Tips
There are two zoom options available from the right-click menu that apply specifically to Nyquist plots:
Full View — Clips unbounded branches of the Nyquist plot, but still includes the critical point (–1, 0).
Zoom on (-1,0) — Zooms around the critical point (–1,0). To access critical-point zoom programmatically, use the
zoomcpcommand.
Plots created using
nyquistplotdo not support multiline titles or labels specified as string arrays or cell arrays of character vectors. To specify multiline titles and labels, use a single string with anewlinecharacter.nyquistplot(sys) title("first line" + newline + "second line");