nyquist
Respuesta de Nyquist de un sistema dinámico
Sintaxis
Descripción
[ también devuelve la desviación estándar estimada de la parte real y la imaginaria de la respuesta en frecuencia para el modelo identificado re,im,wout,sdre,sdim] = nyquist(sys,w)sys. Si omite w, entonces la función determina automáticamente frecuencias en wout en función de la dinámica del sistema.
nyquist(___) crea un diagrama de Nyquist de la respuesta en frecuencia de sys con opciones de representación predeterminadas para todas las combinaciones de argumentos de entrada anteriores. El diagrama muestra la parte real y la imaginaria de la respuesta del sistema como una función de frecuencia. Para ver más opciones de personalización de gráficas, utilice nyquistplot.
Para representar respuestas para múltiples sistemas dinámicos en la misma gráfica, puede especificar
syscomo lista de modelos separada por comas. Por ejemplo,nyquist(sys1,sys2,sys3)representa las respuestas para tres modelos en la misma gráfica.Para especificar un color, un estilo de línea y un marcador para cada sistema de la gráfica, especifique un valor
LineSpecpara cada sistema. Por ejemplo,nyquist(sys1,LineSpec1,sys2,LineSpec2)representa dos modelos y especifica su estilo de gráfica. Para obtener más información sobre cómo especificar un valorLineSpec, consultenyquistplot.
Ejemplos
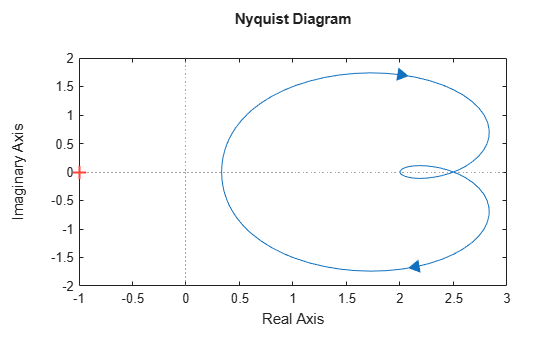
Cree la siguiente función de transferencia y represente su respuesta de Nyquist.
.
H = tf([2 5 1],[1 2 3]); nyquist(H)
La función nyquist puede mostrar una cuadrícula de círculos M, que son los contornos de la magnitud constante de lazo cerrado. Los círculos M se definen como los lugares de números complejos donde la siguiente cantidad es un valor constante en toda la frecuencia.
.
En este caso, ω es la frecuencia en radianes/TimeUnit, donde TimeUnit son las unidades de tiempo del sistema y G es la colección de números complejos que satisfacen el requisito de una magnitud constante.
Para mostrar la cuadrícula de círculos M, haga clic con el botón secundario en el diagrama y seleccione Grid. De manera alternativa, utilice el comando grid.
grid on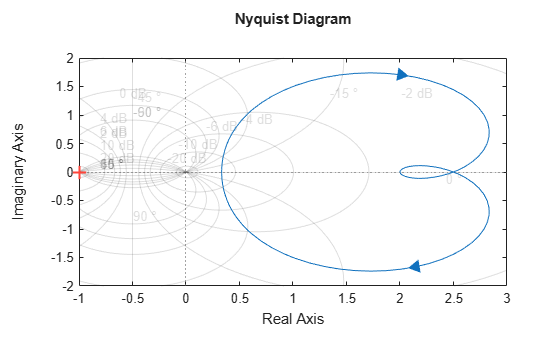
Cree un diagrama de Nyquist a lo largo de un rango de frecuencia especificado. Utilice este enfoque cuando desee centrarse en la dinámica de un rango de frecuencia en particular.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
nyquist(H,{1,100})El arreglo de celdas {1,100} especifica un rango de frecuencia [1,100] para la rama de frecuencia positiva y [–100,–1] para la rama de frecuencia negativa en el diagrama de Nyquist. En el caso de modelos con coeficientes reales, la banda de frecuencia negativa se obtiene mediante simetría. Cuando establece límites de frecuencia de esta manera, la función selecciona los puntos intermedios para los datos de respuesta en frecuencia.
Como alternativa, especifique un vector de puntos de frecuencia para utilizar cuando evalúe y represente la respuesta en frecuencia.
w = 1:0.1:30;
nyquist(H,w,'.-')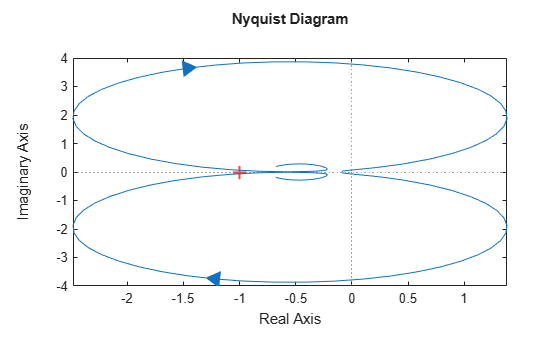
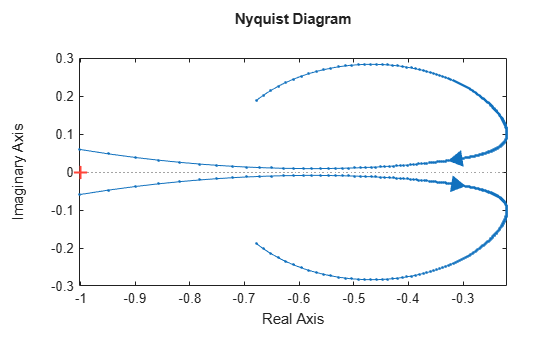
nyquist representa la respuesta en frecuencia en las frecuencias especificadas.
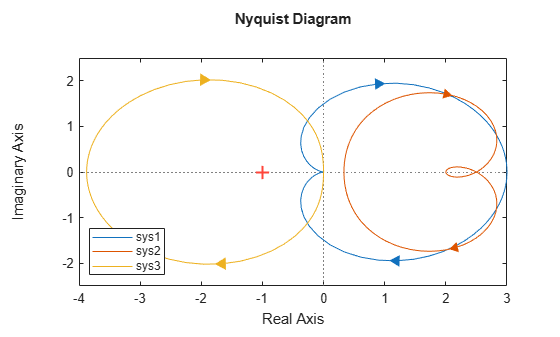
Compare la respuesta en frecuencia de varios sistemas dinámicos en el mismo diagrama de Nyquist.
Cree los sistemas dinámicos.
rng(0) sys1 = tf(3,[1,2,1]); sys2 = tf([2 5 1],[1 2 3]); sys3 = rss(4);
Cree un diagrama de Nyquist que muestre todos los sistemas.
nyquist(sys1,sys2,sys3) legend('Location','southwest')
Especifique el estilo de línea, el color o el marcador en cada sistema de un diagrama de Nyquist utilizando el argumento de entrada LineSpec.
sys1 = tf(3,[1,2,1]); sys2 = tf([2 5 1],[1 2 3]); nyquist(sys1,'o:',sys2,'g')
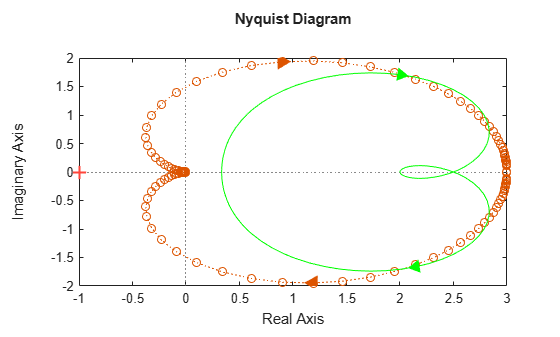
La primera LineSpec, 'o:', especifica una línea de puntos con marcadores circulares para la respuesta de sys1. La segunda LineSpec, 'g', especifica una línea continua verde para la respuesta de sys2.
Calcule la parte real y la imaginaria de la respuesta en frecuencia de un sistema SISO.
Si no se especifican frecuencias, nyquist elige frecuencias en función de la dinámica del sistema y las devuelve en el tercer argumento de salida.
H = tf([2 5 1],[1 2 3]); [re,im,wout] = nyquist(H);
Dado que H es un modelo SISO, las primeras dos dimensiones de re y im son 1. La tercera dimensión es el número de frecuencias de wout.
size(re)
ans = 1×3
1 1 141
length(wout)
ans = 141
De este modo, cada entrada a lo largo de la tercera dimensión de re proporciona la parte real de la respuesta en la correspondiente frecuencia de wout.
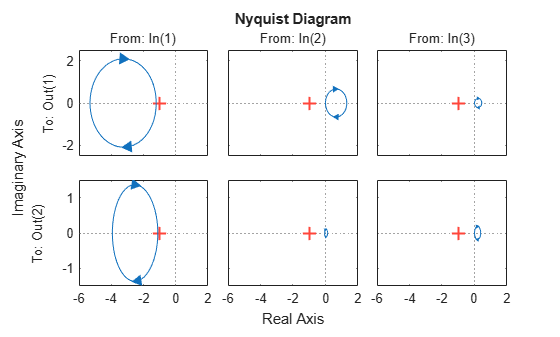
Para este ejemplo, cree un sistema de dos salidas y tres entradas.
rng(0,'twister');
H = rss(4,2,3);En este sistema, nyquist representa las respuestas en frecuencia de cada canal de E/S en un diagrama diferente y en una única figura.
nyquist(H)
Calcule la parte real y la imaginaria de estas respuestas en 20 frecuencias entre 1 y 10 radianes.
w = logspace(0,1,20); [re,im] = nyquist(H,w);
re y im son arreglos tridimensionales en los que las primeras dos dimensiones corresponden a las dimensiones de salida y entrada de H y la tercera dimensión es el número de frecuencias. A modo de ejemplo, examine las dimensiones de re.
size(re)
ans = 1×3
2 3 20
De este modo, por ejemplo, re(1,3,10) es la parte real de la respuesta desde la tercera entrada hasta la primera salida, calculada en la 10.ª frecuencia de w. Del mismo modo, im(1,3,10) contiene la parte imaginaria de la misma respuesta.
Calcule las desviaciones estándar de la parte real y la imaginaria de la respuesta en frecuencia de un modelo identificado. Utilice estos datos para crear una gráfica de 3σ de la incertidumbre de la respuesta.
Cargue los datos de la estimación z2.
load iddata2 z2;
Identifique un modelo de función de transferencia utilizando los datos. Para utilizar el comando tfest se requiere System Identification Toolbox™.
sys_p = tfest(z2,2);
Obtenga las desviaciones estándar para la parte real y la imaginaria de la respuesta en frecuencia para un conjunto de 512 frecuencias w.
w = linspace(-10*pi,10*pi,512); [re,im,wout,sdre,sdim] = nyquist(sys_p,w);
re e im son la parte real y la imaginaria de la respuesta en frecuencia, y sdre y sdim son sus desviaciones estándar respectivamente. Las frecuencias en wout son las mismas que las frecuencias que especificó en w.
Utilice los datos de desviación estándar para crear una gráfica de 3σ que corresponda a la región de confianza.
re = squeeze(re); im = squeeze(im); sdre = squeeze(sdre); sdim = squeeze(sdim); plot(re,im,'b',re+3*sdre,im+3*sdim,'k:',re-3*sdre,im-3*sdim,'k:') xlabel('Real Axis'); ylabel('Imaginary Axis');

Cree un diagrama de Nyquist de un modelo con coeficientes complejos y un modelo con coeficientes reales en el mismo diagrama.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(4); nyquist(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model')
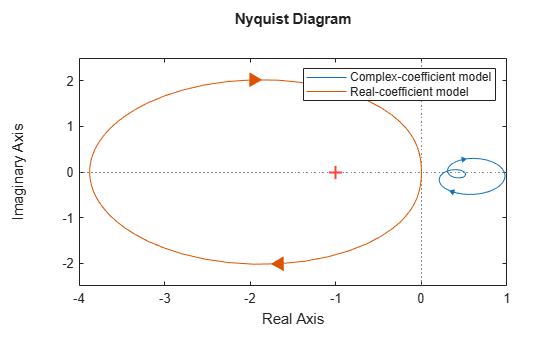
El diagrama de Nyquist muestra siempre dos ramas, una para frecuencias positivas y otra para frecuencias negativas. Las flechas indican la dirección de las frecuencias que aumentan en cada rama. En los modelos con coeficientes complejos, ninguna de las dos ramas es simétrica. En los modelos con coeficientes reales, la rama negativa se obtiene mediante simetría.
Argumentos de entrada
Argumentos de salida
Sugerencias
Existen dos opciones de zoom aplicables específicamente a los diagramas de Nyquist. Estas opciones están disponibles en el menú contextual:
Full View: recorta las ramas sin límite del diagrama de Nyquist, pero sigue incluyendo el punto crítico (–1, 0).
Zoom on (-1,0): amplía la imagen alrededor del punto crítico (–1, 0).
Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar
nyquistplot.Las gráficas creadas con
nyquistno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.nyquist(sys,u,t) title("first line" + newline + "second line");
Historial de versiones
Introducido antes de R2006aConsulte también
nichols | sigma | bode | nyquistplot