pzplot
Representar un mapa de polos y ceros del sistema dinámico
Descripción
La función pzplot representa el mapa de polos y ceros del modelo de sistema dinámico y devuelve un objeto de gráfico PZPlot. Para personalizar la gráfica, modifique las propiedades del objeto de gráfico utilizando la notación de puntos. Para obtener más información, consulte Customize Linear Analysis Plots at Command Line.
La figura muestra mapas de polos y ceros para un modelo lineal variante en el tiempo de tiempo continuo (izquierda) y tiempo discreto (derecha). En los mapas, x y o representan polos y ceros, respectivamente.
En sistemas de tiempo continuo, todos los polos en el plano s complejo deben estar en la mitad izquierda del plano (región azul) para garantizar la estabilidad. El sistema es marginalmente estable si los distintos polos se encuentran en el eje imaginario, es decir, si las partes reales de los polos son cero.
En sistemas de tiempo discreto, todos los polos en el plano z complejo deben estar dentro del círculo unitario (región azul). El sistema es marginalmente estable si tiene uno o más polos situados en el círculo unitario.

Para obtener las ubicaciones de los polos y los ceros, utilice la función pzmap.
Creación
Sintaxis
Descripción
pzp = pzplot(sys)sys, y devuelve el objeto de gráfico correspondiente. En la gráfica, x y o representan polos y ceros, respectivamente.
pzp = pzplot(___,plotoptions)plotoptions. La configuración que especifica en plotoptions anula las preferencias de representación gráfica de la sesión de MATLAB® en curso. Puede utilizar plotoptions con cualquiera de las combinaciones de argumentos de entrada de sintaxis anteriores.
pzp = pzplot(parent,___)Figure o TiledChartLayout, y establece la propiedad Parent. Utilice esta sintaxis cuando desee crear una gráfica en una figura abierta especificada o cuando cree aplicaciones en App Designer.
Argumentos de entrada
Propiedades
Funciones del objeto
addResponse | Add dynamic system response to existing response plot |
Ejemplos
Represente los polos y ceros del sistema en tiempo continuo representado por la siguiente función de transferencia:
sys = tf([2 5 1],[1 3 5]);
pzp = pzplot(sys);
grid on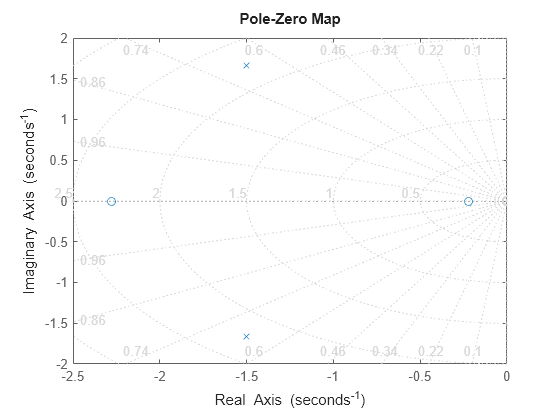
Al activar la cuadrícula se muestran líneas de coeficiente de amortiguación constante (zeta) y líneas de frecuencia natural constante (wn). Este sistema tiene dos ceros reales, marcados con o en la gráfica. El sistema también tiene un par de polos complejos, marcados con x.
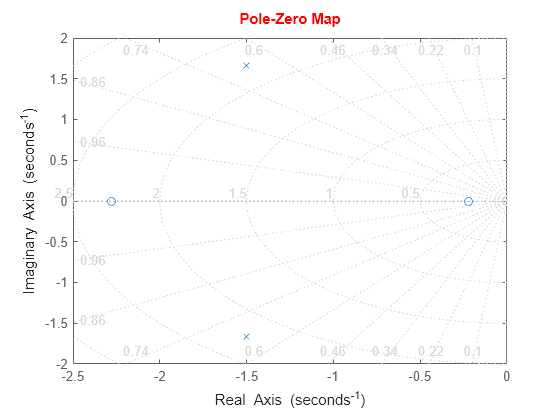
Cambie el color del título de la gráfica.
pzp.Title.Color = [1 0 0];
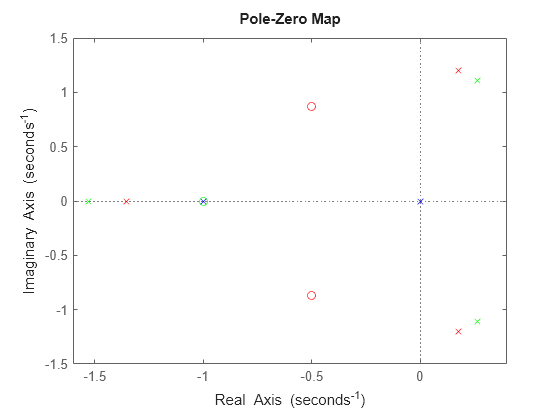
Para este ejemplo, cargue un arreglo de modelos de función de transferencia de 3 por 1.
load('tfArrayMargin.mat','sys'); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Represente los polos y ceros del arreglo de modelos. Defina los colores para cada modelo. Utilice rojo para el primer modelo, verde para el segundo y azul para el tercer modelo del arreglo.
pzplot(sys(:,:,1),'r',sys(:,:,2),'g',sys(:,:,3),'b');
Represente los polos y ceros del sistema de tiempo continuo representado por la siguiente función de transferencia con un conjunto de opciones personalizado:
Cree el conjunto de opciones personalizado con pzoptions.
plotoptions = pzoptions;
Para este ejemplo, especifique que la cuadrícula esté visible.
plotoptions.Grid = 'on';Utilice las opciones indicadas para crear un mapa de polos y ceros de la función de transferencia.
h = pzplot(tf([2 5 1],[1 3 5]),plotoptions);

Al activar la cuadrícula se muestran líneas de coeficiente de amortiguación constante (zeta) y líneas de frecuencia natural constante (wn). Este sistema tiene dos ceros reales, marcados con o en la gráfica. El sistema también tiene un par de polos complejos, marcados con x.
Más acerca de
Sugerencias
Las gráficas creadas con
pzplotno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.impulseplot(sys) title("first line" + newline + "second line");