nichols
Respuesta de Nichols de un sistema dinámico
Descripción
[ calcula la respuesta en frecuencia del modelo de sistema dinámico mag,phase,wout] = nichols(sys)sys y devuelve la magnitud y la fase de la respuesta en cada frecuencia del vector wout. La función determina automáticamente frecuencias de wout en función de la dinámica del sistema.
nichols(___) representa una gráfica de Nichols de la respuesta en frecuencia de sys. La gráfica muestra la magnitud (en dB) y la fase (en grados) de la respuesta del sistema como una función de frecuencia. Para ver más opciones de personalización de gráficas, utilice nicholsplot.
Para representar respuestas para múltiples sistemas dinámicos en la misma gráfica, puede especificar
syscomo lista de modelos separada por comas. Por ejemplo,nichols(sys1,sys2,sys3)representa las respuestas para tres modelos en la misma gráfica.Para especificar un color, un estilo de línea y un marcador para cada sistema de la gráfica, especifique un valor
LineSpecpara cada sistema. Por ejemplo,nichols(sys1,LineSpec1,sys2,LineSpec2)representa dos modelos y especifica su estilo de gráfica. Para obtener más información sobre cómo especificar un valorLineSpec, consultenicholsplot.
Ejemplos
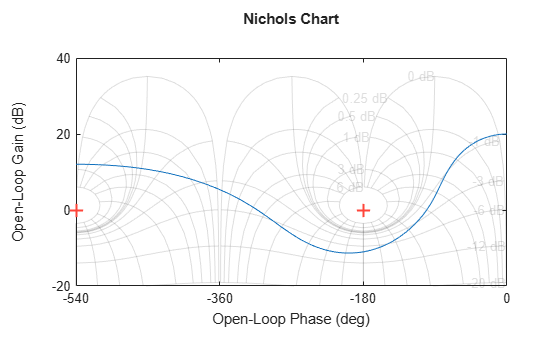
Represente la respuesta de Nichols con líneas de cuadrícula de Nichols para el siguiente sistema:
H = tf([-4 48 -18 250 600],[1 30 282 525 60]); nichols(H) grid
Cree una gráfica de Nichols a lo largo de un rango de frecuencia especificado. Utilice este enfoque cuando desee centrarse en la dinámica de un rango de frecuencia en particular.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
nichols(H,{1,100})El arreglo de celdas {1,100} especifica el valor de frecuencia mínimo y máximo de la gráfica de Nichols. Cuando establece límites de frecuencia de esta manera, la función selecciona los puntos intermedios para los datos de respuesta en frecuencia.
Como alternativa, especifique un vector de puntos de frecuencia para utilizar cuando evalúe y represente la respuesta en frecuencia.
w = 1:0.5:100;
nichols(H,w,'.-')

nichols representa la respuesta en frecuencia solo en las frecuencias especificadas.
Compare la respuesta en frecuencia de un sistema en tiempo continuo con un sistema discretizado equivalente en la misma gráfica de Nichols.
Cree sistemas dinámicos en tiempo continuo y tiempo discreto.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Cree una gráfica de Nichols que muestre ambos sistemas.
nichols(H,Hd)

Especifique el estilo de línea, el color o el marcador en cada sistema de una gráfica de Nichols utilizando el argumento de entrada LineSpec.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); nichols(H,'r',Hd,'b--')
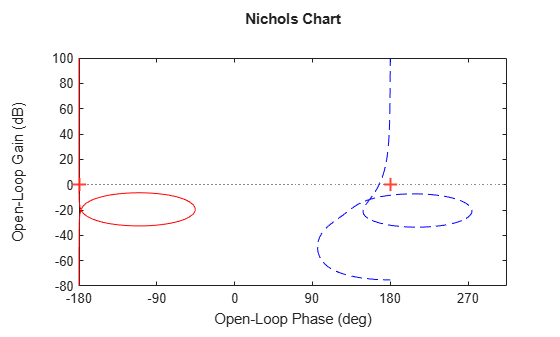
La primera LineSpec, 'r', especifica una línea continua roja para la respuesta de H. La segunda LineSpec, 'b--', especifica una línea discontinua azul para la respuesta de Hd.
Calcule la magnitud y la fase de la respuesta en frecuencia de un sistema SISO.
Si no se especifican frecuencias, nichols elige frecuencias en función de la dinámica del sistema y las devuelve en el tercer argumento de salida.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [mag,phase,wout] = nichols(H);
Dado que H es un modelo SISO, las primeras dos dimensiones de mag y phase son 1. La tercera dimensión es el número de frecuencias de wout.
size(mag)
ans = 1×3
1 1 110
length(wout)
ans = 110
De este modo, cada entrada a lo largo de la tercera dimensión de mag proporciona la magnitud de la respuesta en la correspondiente frecuencia de wout.
Para este ejemplo, cree un sistema de dos salidas y tres entradas.
rng(0,'twister');
H = rss(4,2,3);En este sistema, nichols representa las respuestas en frecuencia de cada canal de E/S en un diagrama diferente y en una única figura.
nichols(H)

Calcule la magnitud y la fase de estas respuestas en 20 frecuencias entre 1 y 10 radianes.
w = logspace(0,1,20); [mag,phase] = nichols(H,w);
mag y phase son arreglos tridimensionales en los que las primeras dos dimensiones corresponden a las dimensiones de salida y entrada de H y la tercera dimensión es el número de frecuencias. A modo de ejemplo, examine las dimensiones de mag.
size(mag)
ans = 1×3
2 3 20
De este modo, por ejemplo, mag(1,3,10) es la magnitud de la respuesta desde la tercera entrada hasta la primera salida, calculada en la 10.ª frecuencia de w. Del mismo modo, phase(1,3,10) contiene la fase de la misma respuesta.
Cree una gráfica de Nichols de un modelo con coeficientes complejos y un modelo con coeficientes reales en el mismo diagrama.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(7); nichols(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model','Location','southwest')
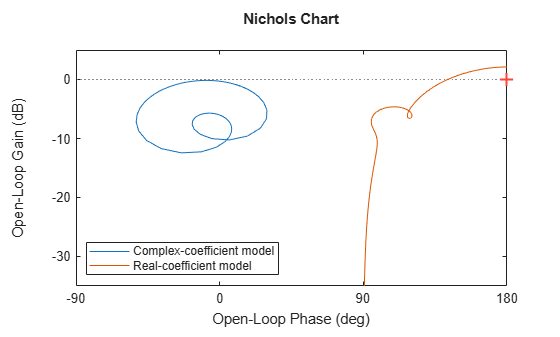
Para modelos con coeficientes complejos, nichols muestra un contorno que consta de frecuencias positivas y negativas. Para modelos con coeficientes reales, el diagrama muestra solo frecuencias positivas, incluso cuando hay modelos de coeficientes complejos. Puede hacer clic en la curva para examinar mejor qué sección y valores corresponden a frecuencias positivas y negativas.
Argumentos de entrada
Argumentos de salida
Sugerencias
Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar
nicholsplot.Las gráficas creadas con
nicholsno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.nichols(sys) title("first line" + newline + "second line");
Historial de versiones
Introducido antes de R2006aConsulte también
nyquist | bode | nicholsplot