lidarLaneDetector
Description
Add-On Required: This feature requires the Automated Driving Toolbox Model for Lidar Lane Detection add-on.
The lidarLaneDetector object creates a lidar lane detection network
utilizing global feature correlation (LLDN-GFC) lane detector. Using this object, you
can:
Create a pretrained lidar lane detector by using LLDN-GFC deep learning network trained on the K-Lane data set.
Create a custom lidar lane detector by using a pretrained or untrained LLDN-GFC deep learning network.
Creation
Syntax
Description
Pretrained LLDN-GFC Lane Detector
detector = lidarLaneDetector
Custom LLDN-GFC Lane Detector
detector = lidarLaneDetector(name)
If name is "lldn-gfc-klane", the function
creates a pretrained LLDN-GFC lane detector by using an LLDN-GFC deep learning network
trained on the K-Lane data set.
If name is "lldn-gfc-untrained", the
function creates an untrained LLDN-GFC lane detector by using an untrained LLDN-GFC deep
learning network, to use for training and inference. Use the
trainLidarLaneDetector function to train the network before
performing lane detection.
detector = lidarLaneDetector(name,classes)classes.
If name is "lldn-gfc-klane", the function
creates a pretrained LLDN-GFC lane detector by using an LLDN-GFC deep learning network
trained on the K-Lane data set and configures it to perform transfer learning using the
specified set of lane classes. For optimal results, you must train the detector on new
training data before performing detection. Use the trainLidarLaneDetector function to train the detector.
If name is "lldn-gfc-untrained", the
function creates an untrained LLDN-GFC lane detector by using an untrained LLDN-GFC deep
learning network, to use for training and inference. Use the
trainLidarLaneDetector function to train the network to detect
the specified classes before performing object detection.
detector = lidarLaneDetector(___,ModelName=modelName)ModelName property of the lane detector in addition to any
combination of input arguments from previous syntaxes.
Input Arguments
Properties
Object Functions
Examples
Specify the name of the pretrained LLDN-GFC lane detector.
name = "lldn-gfc-klane";Create a lane detector by using the pretrained LLDN-GFC deep learning network.
detector = lidarLaneDetector(name);
Read a test point cloud and detect lanes in it.
ptCloud = pcread("highway.pcd");
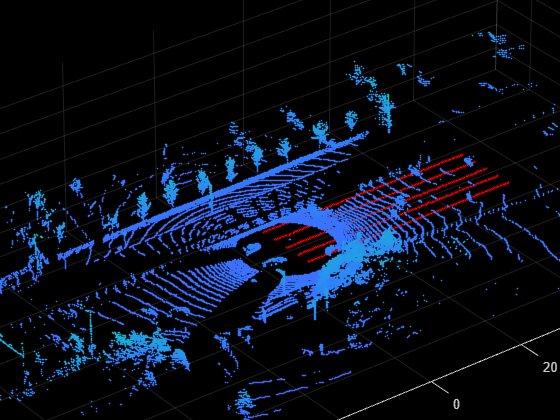
laneDetections = detect(detector,ptCloud);Display the detection results.
figure ax = pcshow(ptCloud); set(ax,XLim=[-80 80],YLim=[-40 40]) zoom(ax,3); hold on plot3(laneDetections(:,1),laneDetections(:,2),laneDetections(:,3),'*',MarkerSize=2,Color="r")
References
[1] Paek, Dong-Hee, Seung-Hyun Kong, and Kevin Tirta Wijaya. “K-Lane: Lidar Lane Dataset and Benchmark for Urban Roads and Highways.” In 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 4449–58. New Orleans, LA, USA: IEEE, 2022. https://doi.org/10.1109/CVPRW56347.2022.00491.
Version History
Introduced in R2023b
See Also
trainLidarLaneDetector | trainPointPillarsObjectDetector (Lidar Toolbox) | pointPillarsObjectDetector (Lidar Toolbox)