detect
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Model for Lidar Lane Detection add-on.
detectionResults = detect(detector,ds)ds.
[___] = detect(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example,
Name=Value)ExecutionEnvironment="cpu" specifies to use the CPU to detect lanes
within an input point cloud.
Examples
Specify the name of the pretrained LLDN-GFC lane detector.
name = "lldn-gfc-klane";Create a lane detector by using the pretrained LLDN-GFC deep learning network.
detector = lidarLaneDetector(name);
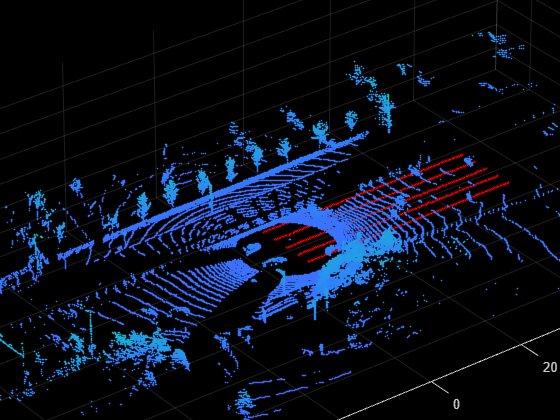
Read a test point cloud and detect lanes in it.
ptCloud = pcread("highway.pcd");
laneDetections = detect(detector,ptCloud);Display the detection results.
figure ax = pcshow(ptCloud); set(ax,XLim=[-80 80],YLim=[-40 40]) zoom(ax,3); hold on plot3(laneDetections(:,1),laneDetections(:,2),laneDetections(:,3),'*',MarkerSize=2,Color="r")
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Paek, Dong-Hee, Seung-Hyun Kong, and Kevin Tirta Wijaya. “K-Lane: Lidar Lane Dataset and Benchmark for Urban Roads and Highways.” In 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 4449–58. New Orleans, LA, USA: IEEE, 2022. https://doi.org/10.1109/CVPRW56347.2022.00491.
Version History
Introduced in R2023b