imbilatfilt
Filtrado bilateral de imágenes con núcleos gaussianos
Sintaxis
Descripción
J = imbilatfilt(I,degreeOfSmoothing)degreeOfSmoothing es un valor pequeño, imbilatfilt suaviza los entornos con una varianza pequeña (áreas uniformes), pero no los entornos con una varianza grande, como los bordes pronunciados. Cuando aumenta el valor de degreeOfSmoothing, imbilatfilt suaviza tanto las áreas uniformes como los entornos con una varianza mayor.
J = imbilatfilt(I,degreeOfSmoothing,spatialSigma)spatialSigma, del núcleo de suavizado gaussiano espacial. Los valores más grandes de spatialSigma aumentan la contribución de los píxeles vecinos más distantes, aumentando efectivamente el tamaño del entorno.
J = imbilatfilt(___,Name=Value)
Ejemplos
Lea una imagen en escala de grises y muéstrela. Observe el artefacto de estriado horizontal en la región del cielo.
I = imread('cameraman.tif');
imshow(I)
Inspeccione una sección de la imagen en la región del cielo. Calcule la varianza de la sección, que se aproxima a la varianza del ruido.
patch = imcrop(I,[170, 35, 50 50]); imshow(patch)
patchVar = std2(patch)^2;
Filtre la imagen utilizando filtrado bilateral. Establezca el grado de suavizado para que sea mayor que la varianza del ruido.
DoS = 2*patchVar;
J = imbilatfilt(I,DoS);
imshow(J)
title(['Degree of Smoothing: ',num2str(DoS)])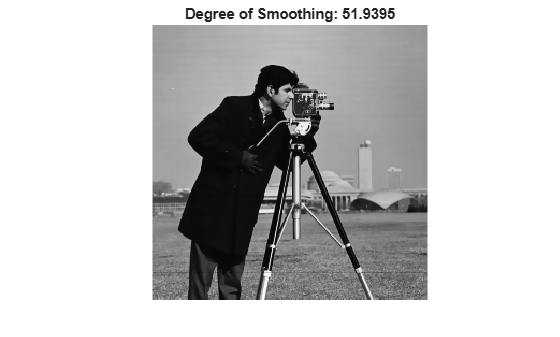
El artefacto de estriado se reduce, pero no se elimina. Para mejorar el suavizado, aumente el valor de spatialSigma a 2 para que los píxeles vecinos distantes contribuyan más al núcleo de suavizado gaussiano. En la práctica, esto aumenta la extensión espacial del filtro bilateral.
K = imbilatfilt(I,DoS,2); imshow(K) title(['Degree of Smoothing: ',num2str(DoS),', Spatial Sigma: 2'])
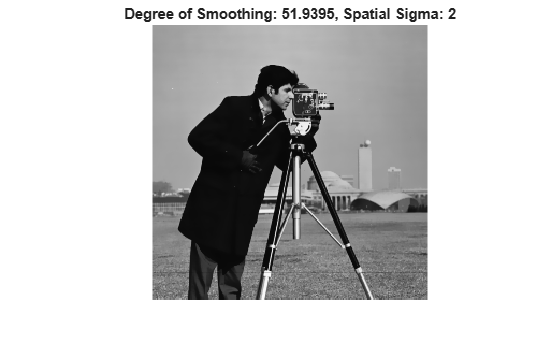
El artefacto de estriado en el cielo se elimina correctamente. Se han conservado la nitidez de los bordes intensos, como la silueta del hombre, y las regiones texturizadas, como la hierba en el primer plano de la imagen.
Lea una imagen RGB.
imRGB = imread("coloredChips.png");
imshow(imRGB)
Convierta la imagen al espacio de color L*a*b*, de modo que el filtro bilateral suavice los colores que se perciben como similares.
imLAB = rgb2lab(imRGB);
Extraiga una sección que no contenga bordes nítidos. Calcule la varianza en la distancia euclidiana desde el origen, en el espacio de color L*a*b*.
patch = imcrop(imLAB,[34,71,60,55]); patchSq = patch.^2; edist = sqrt(sum(patchSq,3)); patchVar = std2(edist).^2;
Filtre la imagen en el espacio de color L*a*b* utilizando filtrado bilateral. Establezca el valor de DegreeOfSmoothing para que sea mayor que la varianza de la sección.
DoS = 2*patchVar; smoothedLAB = imbilatfilt(imLAB,DoS);
Convierta la imagen de nuevo al espacio de color RGB y muestre la imagen suavizada.
smoothedRBG = lab2rgb(smoothedLAB,"Out","uint8"); montage({imRGB,smoothedRBG}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS))

Los colores de las fichas y el bolígrafo negro se muestran más uniformes, pero las vetas horizontales de la mesa aún son visibles. Aumente la extensión espacial del filtro para que el entorno efectivo del filtro abarque el espacio entre las vetas horizontales (esta distancia es aproximadamente de siete píxeles). Aumente también el DegreeOfSmoothing para suavizar estas regiones de forma más agresiva.
DoS2 = 4*patchVar; sigma = 7; smoothedLAB2 = imbilatfilt(imLAB,DoS2,sigma); smoothedRBG2 = lab2rgb(smoothedLAB2,"Out","uint8"); montage({imRGB,smoothedRBG2}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS)+ ... " and Spatial Sigma: "+sigma)

El color de la mesa de madera es más uniforme con este entorno más extenso y el mayor grado de suavizado. Se conserva la nitidez de los bordes de las fichas y el bolígrafo.
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Sugerencias
El valor de
degreeOfSmoothingcorresponde a la varianza del núcleo gaussiano de intervalo del filtro bilateral [1]. El intervalo gaussiano se aplica a la distancia euclidiana de un valor de píxel a partir de los valores de sus vecinos.Para suavizar perceptivamente los colores cercanos de una imagen RGB, convierta la imagen al espacio L*a*b* CIE utilizando
rgb2labantes de aplicar el filtro bilateral. Para ver los resultados, convierta la imagen filtrada a RGB utilizandolab2rgb.Al aumentar
spatialSigmaaumentaNeighborhoodSize, lo que aumenta el tiempo de ejecución del filtro. Se puede especificar unNeighborhoodSizemás pequeño para lograr un tiempo de ejecución más rápido a costa de la precisión.
Referencias
[1] Tomasi, C., and R. Manduchi. "Bilateral Filtering for Gray and Color Images". Proceedings of the 1998 IEEE® International Conference on Computer Vision. Bombay, India. Jan 1998, pp. 836–846.
Capacidades ampliadas
Historial de versiones
Introducido en R2018aConsulte también
imdiffusefilt | imgaussfilt | imguidedfilter | imfilter | nlfilter | locallapfilt | imnlmfilt