addlink
Sintaxis
Descripción
linkIDs = addlink(graph,statePairs)navGraph.
linkIDs = addlink(graph,statePairs,metadata1,...metadataN)Weights, además de los pares de estados. Sin embargo, la primera columna de la tabla siempre debe especificar los pares de estados que se conectarán.
[ también devuelve linkIDs,status] = addlink(___)status, que indica si los nuevos enlaces se agregaron correctamente al gráfico. Si los enlaces recién especificados entran en conflicto con los enlaces existentes en el gráfico, la función ignora los enlaces en conflicto y los enlaces existentes permanecen sin cambios.
Ejemplos
Cargue el objeto navGraph en el espacio de trabajo MATLAB ® e inspeccione sus propiedades.
load("navGraphData.mat")
disp(navGraphObj) navGraph with properties:
States: [8×3 table]
Links: [7×3 table]
LinkWeightFcn: @nav.algs.distanceEuclidean
Inspeccione la tabla de estados del gráfico.
disp(navGraphObj.States)
StateVector Name Lanes
_______________________ _____ _____
8 2 0.72176 {'A'} 2
1 1 0.29188 {'B'} 2
7 7 0.91777 {'C'} 2
8 10 0.71458 {'D'} 2
5 1 0.54254 {'E'} 2
3 6 0.14217 {'F'} 2
2 9 0.37334 {'G'} 3
8 7 0.67413 {'H'} 2
Inspeccione la tabla de enlaces del gráfico. La primera columna contiene los índices de los estados de la tabla de estados. Los vectores de dos elementos en la primera columna de la tabla representan los pares de estados que están conectados. Tenga en cuenta que la tabla de enlaces también contiene metadatos 'Weight' y 'Curvature' además de los pares de estados conectados.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 7 8.921 0.0063649
5 4 2.387 0.0060558
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
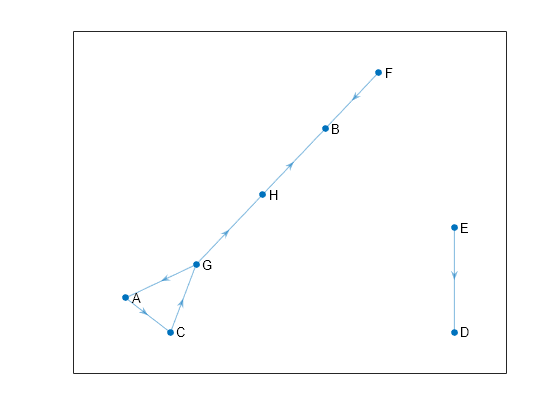
Mostrar el gráfico.
show(navGraphObj)

Del gráfico se puede inferir que los estados 'D' y 'E' no están conectados a ningún otro estado y no existe ninguna ruta cuando un punto de inicio o de destino se encuentra en uno de estos estados. Para conectar estos estados, utilice la función addlink. Especifique los pares de estados que se conectarán utilizando los índices o los nombres de estados de la tabla de estados.
Especificar índices de estado para agregar enlaces
En la tabla de estados del gráfico de entrada se puede encontrar que los índices para los estados con nombres "E" y "F" son 5 y 6, respectivamente. Especifique estos índices como entrada para conectar los estados "E" y "F".
Id = addlink(navGraphObj,[5 6],2.5,0.001)
Id = 4
Inspeccione la tabla de enlaces actualizada para ver nuevos estados y los metadatos relacionados. Tenga en cuenta que los índices de estado de los nuevos pares de estados se agregan a la quinta fila de la tabla de vínculos. Las entradas de la tabla de enlaces se ordenan según el índice del primer estado de cada par de estados enumerado en la primera columna. Las filas que tienen el mismo índice para el primer estado se ordenan según el índice del segundo estado en cada par de estados.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 7 8.921 0.0063649
5 4 2.387 0.0060558
5 6 2.5 0.001
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
Mostrar el gráfico actualizado. Ahora todos los estados en el gráfico de entrada están conectados, puedes calcular la ruta para cualquier punto de inicio y destino que se encuentre entre estos estados.
show(navGraphObj)

Especifique los nombres de los estados para agregar enlaces
Añade un enlace entre los estados con los nombres "C" y "D". Además del par de estados, también debe especificar el valor de los metadatos Weight y Curvature asociados en la tabla de vínculos.
Id = addlink(navGraphObj,["C" "D"],5,0.004)
Id = 2
Inspeccione la tabla de enlaces actualizada para ver nuevos pares de estados y los metadatos relacionados. Tenga en cuenta que los índices de estado de los nuevos pares de estados se agregan a la segunda fila de la tabla de vínculos.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 4 5 0.004
3 7 8.921 0.0063649
5 4 2.387 0.0060558
5 6 2.5 0.001
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
show(navGraphObj)

Cargue el objeto navGraph en el espacio de trabajo MATLAB ® e inspeccione sus propiedades.
load("navGraphData.mat")
disp(navGraphObj) navGraph with properties:
States: [8×3 table]
Links: [7×3 table]
LinkWeightFcn: @nav.algs.distanceEuclidean
Inspeccione la tabla de estados del gráfico.
disp(navGraphObj.States)
StateVector Name Lanes
_______________________ _____ _____
8 2 0.72176 {'A'} 2
1 1 0.29188 {'B'} 2
7 7 0.91777 {'C'} 2
8 10 0.71458 {'D'} 2
5 1 0.54254 {'E'} 2
3 6 0.14217 {'F'} 2
2 9 0.37334 {'G'} 3
8 7 0.67413 {'H'} 2
Inspeccione la tabla de enlaces del gráfico. La primera columna contiene los índices de los estados de la tabla de estados. Los vectores de dos elementos en la primera columna de la tabla representan los pares de estados que están conectados. Tenga en cuenta que la tabla de enlaces también contiene metadatos 'Weight' y 'Curvature' además de los pares de estados conectados.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 7 8.921 0.0063649
5 4 2.387 0.0060558
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
Mostrar el gráfico. Del gráfico se puede inferir que los estados 'D' y 'E' no están conectados a ningún otro estado y no existe ninguna ruta cuando un punto de inicio o de destino se encuentra en uno de estos estados.
show(navGraphObj)
Añade enlaces entre estos pares de estados:
Estados con nombres "
C" y "D".Estados con nombres "
E" y "F".Estados con nombres "
H" y "D"
Además de los pares de estados, también debe especificar los valores de los metadatos Weight y Curvature asociados en la tabla de vínculos. La función devuelve los índices de los nuevos pares de estados en la tabla de enlaces.
Id = addlink(navGraphObj,["C" "D";"E" "F";"H" "D"],[5;2.5;50],[0.005;0.003;0.004])
Id = 3×1
2
5
10
Inspeccione la tabla de enlaces actualizada para ver nuevos pares de estados y sus metadatos asociados. Tenga en cuenta que los índices de estado de los nuevos pares de estados se agregan a la segunda, quinta y décima fila de la tabla de vínculos. Las entradas de la tabla de enlaces se ordenan según el índice del primer estado de cada par de estados enumerado en la primera columna. Las filas que tienen el mismo índice para el primer estado se ordenan según el índice del segundo estado en cada par de estados.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 4 5 0.005
3 7 8.921 0.0063649
5 4 2.387 0.0060558
5 6 2.5 0.003
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
8 4 50 0.004
Mostrar el gráfico actualizado.
show(navGraphObj)

Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2024aConsulte también
addstate | rmstate | rmlink | findlink | findstate | index2state | state2index | successors | show | copy