Detect and Diagnose Faults
Condition monitoring includes discriminating between faulty and healthy states (fault detection) or, when a fault state is present, determining the source of the fault (fault diagnosis). To design an algorithm for condition monitoring, you use condition indicators extracted from system data to train a decision model that can analyze test data to determine the current system state.
When designing your algorithm, you might test different fault detection and diagnosis models using different condition indicators. Thus, this step in the design process is likely iterative with the step of extracting condition indicators, as you try different indicators, different combinations of indicators, and different decision models.
For an overview of the types of models you can use, see Decision Models for Fault Detection and Diagnosis.
Functions
Topics
Decision Models
- Decision Models for Fault Detection and Diagnosis
Use condition indicators extracted from healthy and faulty data to train classifiers or regression models for detecting and diagnosing faults.
Fault Diagnosis Using Model-Based Approach
- Fault Diagnosis of Centrifugal Pumps Using Steady State Experiments
Use a model-based approach for detection and diagnosis of different types of faults in a pumping system. - Fault Diagnosis of Centrifugal Pumps Using Residual Analysis
Use a model parity-equations-based approach for detection and diagnosis of faults in a pumping system.
Fault Detection Using System Identification
- Fault Detection Using Data Based Models
Use a data-based modeling approach for fault detection. - Fault Detection Using an Extended Kalman Filter
Use an extended Kalman filter for online estimation of the friction of a simple DC motor. Significant changes in the estimated friction are detected and indicate a fault. - Detect Abrupt System Changes Using Identification Techniques
Detect abrupt changes in the behavior of a system using online estimation and automatic data segmentation techniques.
Multiclass Fault Detection
- Multi-Class Fault Detection Using Simulated Data
Use a Simulink model to generate faulty and healthy data, and use the data to develop a multi-class classifier to detect different combinations of faults. - Analyze and Select Features for Pump Diagnostics
Use the Diagnostic Feature Designer app to analyze and select features to diagnose faults in a triplex reciprocating pump.
Fault Detection and Diagnosis Using Artificial Intelligence
- Chemical Process Fault Detection Using Deep Learning
Use simulation data to train a neural network than can detect faults in a chemical process. - Rolling Element Bearing Fault Diagnosis Using Deep Learning
This example shows how to perform fault diagnosis of a rolling element bearing using a deep learning approach. - Accelerate Fault Diagnosis Using GPU Data Preprocessing and Deep Learning
This example shows how to use GPU computing to accelerate data preprocessing and deep learning for predictive maintenance workflows. (Since R2025a) - Detect Anomalies in Industrial Machinery Using Three-Axis Vibration Data
Detect anomalies in industrial machine vibration data using machine-learning and deep-learning models trained with data representing only nominal behavior. - Detect Aging Severity in Power Converters
Generate synthetic semiconductor degradation data from a power converter model, and use that data to build a predictive maintenance algorithm that can detect aging severity in a power converter.
Related Information
Featured Examples

Multi-Class Fault Detection Using Simulated Data
Use a Simulink model to generate faulty and healthy data, and use the data to develop a multi-class classifier to detect different combinations of faults.
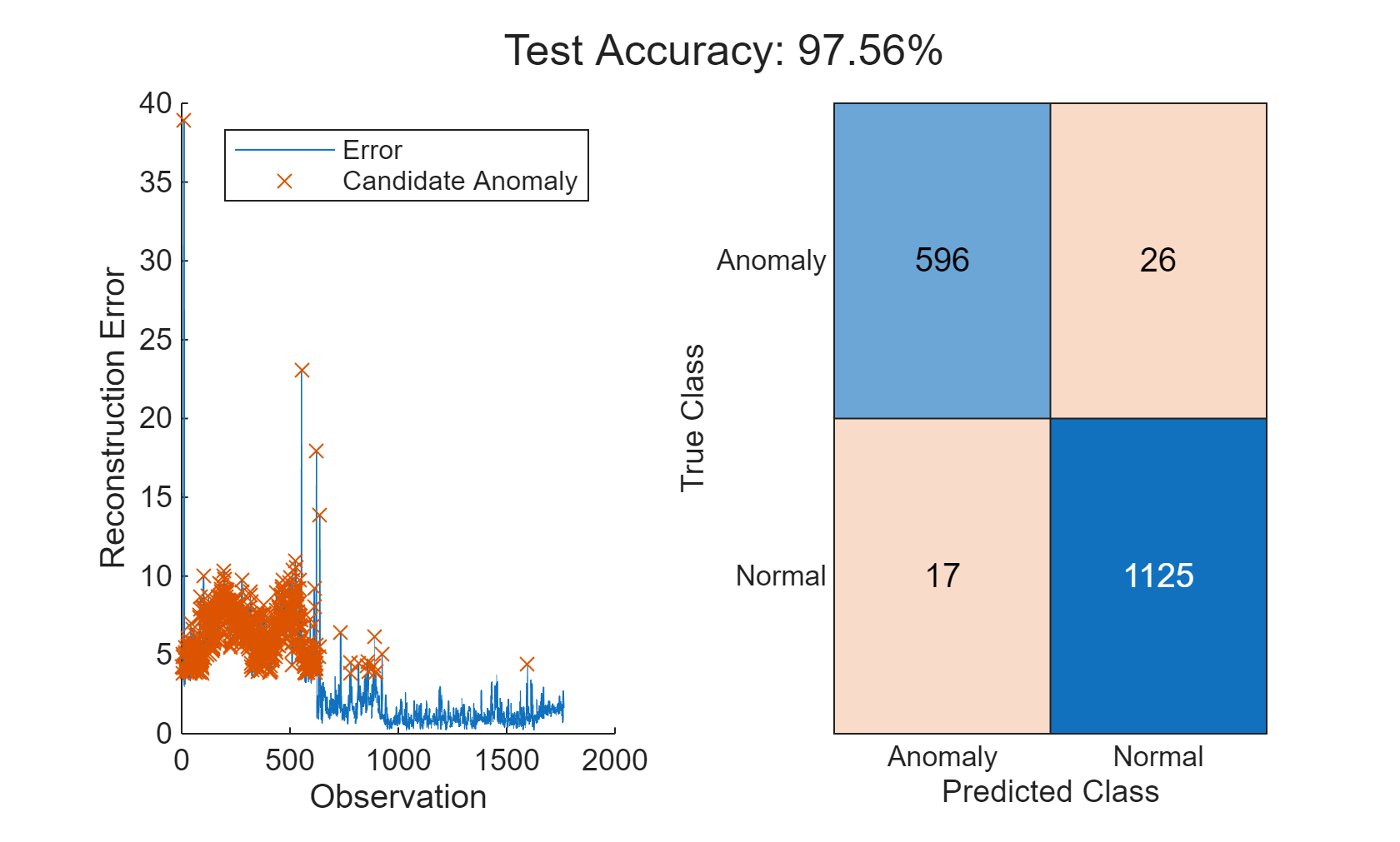
Detect Anomalies in Industrial Machinery Using Three-Axis Vibration Data
Detect anomalies in industrial machine vibration data using machine-learning and deep-learning models trained with data representing only nominal behavior.

Broken Rotor Fault Detection in AC Induction Motors Using Vibration and Electrical Signals
Use the Diagnostic Feature Designer app to detect broken rotor faults in AC induction motors using vibration and electrical signals.