Esta página es para la versión anterior. La página correspondiente en inglés ha sido eliminada en la versión actual.
Modelado y simulación de robots
Cuando trabaja con robots, el modelado y la simulación permiten crear prototipos de algoritmos rápidamente y probar escenarios imitando el comportamiento de los sistemas del mundo real. Estas funciones proporcionan modelos cinemáticos para modelar el movimiento de robot móviles y manipuladores. La toolbox también admite el escalonamiento sincronizado de Simulink® con Gazebo para diseñar algoritmos de robótica con simulaciones físicas.
Funciones
Bloques
Temas
- Simulación con Gazebo para Robotics System Toolbox
Aprenda a utilizar algoritmos de robótica en MATLAB y Simulink y a visualizar su rendimiento en un entorno virtual mediante el simulador Gazebo.
- Requisitos y limitaciones del entorno de simulación Gazebo
Cuando simule en el entorno Gazebo, tenga en cuenta estos requisitos de software, las recomendaciones mínimas de hardware y las limitaciones.
- Cómo funciona la simulación con Gazebo para Robotics System Toolbox
Obtenga más información sobre el marco de cosimulación entre MATLAB, Simulink y el simulador Gazebo.
- Run and Connect to Multiple Gazebo Sessions from Simulink
This example shows how to run multiple Gazebo sessions in a virtual machine (VM) and connect to these sessions simultaneously from Simulink® using the
parsim(Simulink) function. - Execute Code at a Fixed-Rate
By executing code at constant intervals, you can accurately time and schedule tasks.
- Simular diferentes modelos cinemáticos para robots móviles
Este ejemplo muestra cómo modelar diferentes modelos cinemáticos de robot en un entorno y compararlos.
- Realizar cosimulación entre Simulink y Gazebo
Este ejemplo muestra cómo configurar una simulación sincronizada entre Simulink™ y Gazebo para enviar comandos y recibir datos de Gazebo.
- Controlar el robot con tracción diferencial en Gazebo con Simulink
En este ejemplo se muestra cómo controlar un robot con tracción diferencial en la cosimulación con Gazebo mediante Simulink.
- Control and Simulate Multiple Warehouse Robots
Control and simulate multiple robots working in a warehouse facility or distribution center.
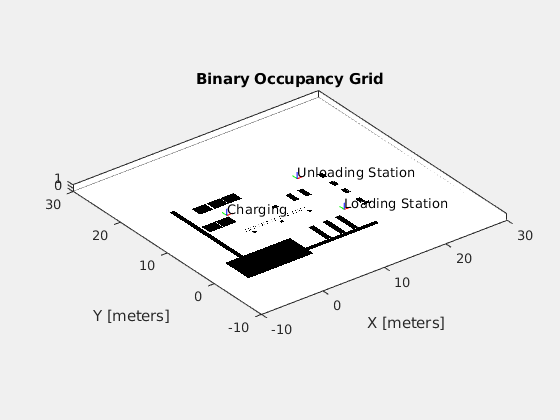
- Simulate a Mobile Robot in a Warehouse Using Gazebo
This example shows how to simulate a warehouse robot in Gazebo.
- Configure Gazebo and Simulink for Co-simulation of a Manipulator Robot
Set up a UR10 robot model to perform co-simulation between Gazebo and Simulink™.
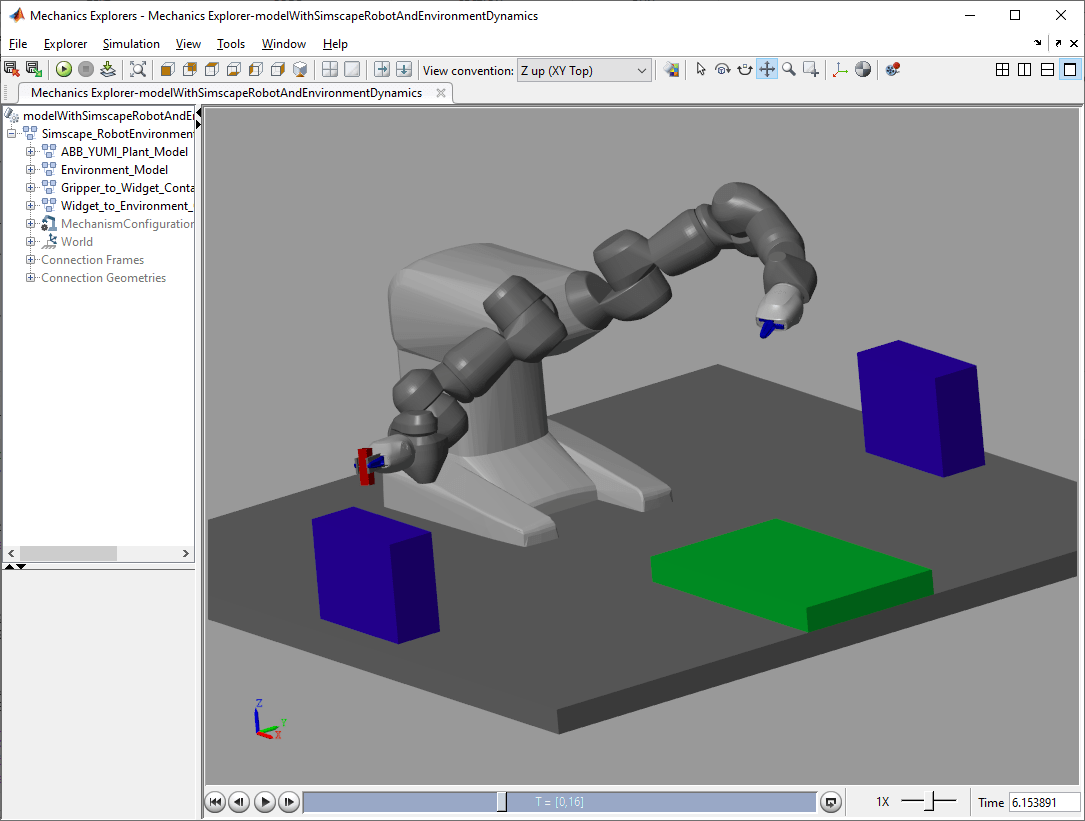
- Control Manipulator Robot with Co-Simulation in Simulink and Gazebo
Simulate control of a robotic manipulator using co-simulation between Simulink and Gazebo.
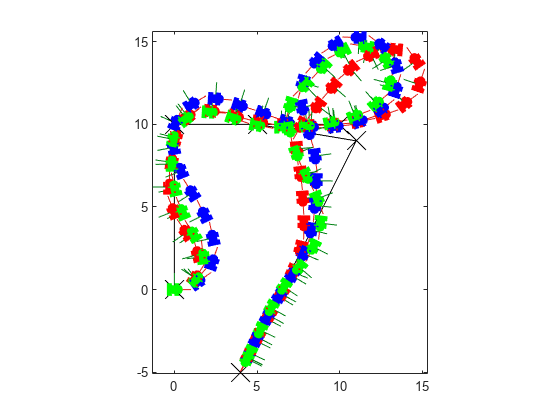
- Planificar y ejecutar trayectorias de espacio cartesiano o articular utilizando el manipulador KINOVA Gen3
Este ejemplo muestra cómo generar y simular trayectorias de articulación interpoladas para pasar de una pose inicial a una pose deseada del efector final.
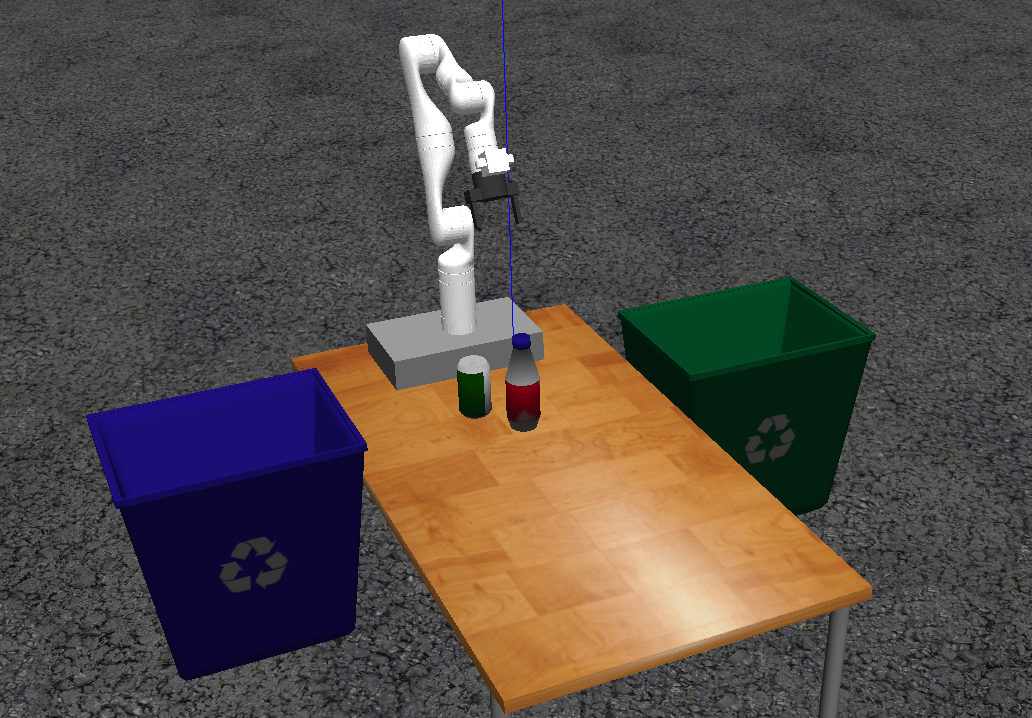
- Plan and Execute Collision-Free Trajectories Using KINOVA Gen3 Manipulator
This example shows how to plan closed-loop collision-free robot trajectories from an initial to a desired end-effector pose using nonlinear model predictive control.
- Simulate Joint-Space Trajectory Tracking in MATLAB
This example shows how to simulate the joint-space motion of a robotic manipulator under closed-loop control.
Ejemplos destacados









You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)