Inverse Kinematics
Calcular configuraciones de articulación para lograr una pose del efector final
Bibliotecas:
Robotics System Toolbox /
Manipulator Algorithms
Descripción
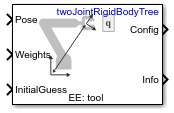
El bloque Inverse Kinematics utiliza un solver de cinemática inversa (IK) para calcular las configuraciones de articulación de la pose del efector final deseada a partir de un modelo de árbol de cuerpo rígido especificado. Cree un modelo de árbol de cuerpo rígido para el robot mediante la clase rigidBodyTree. El modelo de árbol de cuerpo rígido define todas las restricciones de articulación que aplica el solver.
Especifique el parámetro RigidBodyTree y el efector final deseado dentro de la máscara de bloque. También puede ajustar los parámetros del algoritmo en la pestaña Solver Parameters.
Introduzca la pose Pose del efector final, las ponderaciones Weights de la tolerancia de la pose y la estimación inicial InitialGuess deseadas para la configuración de la articulación. El solver genera como salida una configuración del robot, Config, que cumple la pose del efector final dentro de las tolerancias especificadas en la pestaña Solver Parameters.
Ejemplos

Trazar la trayectoria de un efector final con cinemática inversa en Simulink
Calcule la cinemática inversa en Simulink® para trazar una trayectoria del efector final definida con un modelo de robot de cuerpo rígido.
Puertos
Entrada
Salida
Parámetros
Referencias
[1] Badreddine, Hassan, Stefan Vandewalle, and Johan Meyers. "Sequential Quadratic Programming (SQP) for Optimal Control in Direct Numerical Simulation of Turbulent Flow." Journal of Computational Physics. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, Dimitri P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999.
[3] Goldfarb, Donald. "Extension of Davidon’s Variable Metric Method to Maximization Under Linear Inequality and Equality Constraints." SIAM Journal on Applied Mathematics. Vol. 17, No. 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Jorge, and Stephen Wright. Numerical Optimization. New York, NY: Springer, 2006.
[5] Sugihara, Tomomichi. "Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method." IEEE Transactions on Robotics. Vol. 27, No. 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Zhao, Jianmin, and Norman I. Badler. "Inverse Kinematics Positioning Using Nonlinear Programming for Highly Articulated Figures." ACM Transactions on Graphics. Vol. 13, No. 4 (1994): 313–36. doi:10.1145/195826.195827.