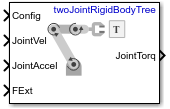
Inverse Dynamics
Pares articulares requeridos para un movimiento determinado
Bibliotecas:
Robotics System Toolbox /
Manipulator Algorithms
Descripción
El bloque Inverse Dynamics devuelve los pares articulares requeridos para mantener el robot en el estado especificado. Para obtener los pares articulares requeridos, especifique la configuración del robot (posiciones de articulación), las velocidades y aceleraciones de articulación, y las fuerzas externas.
Ejemplos
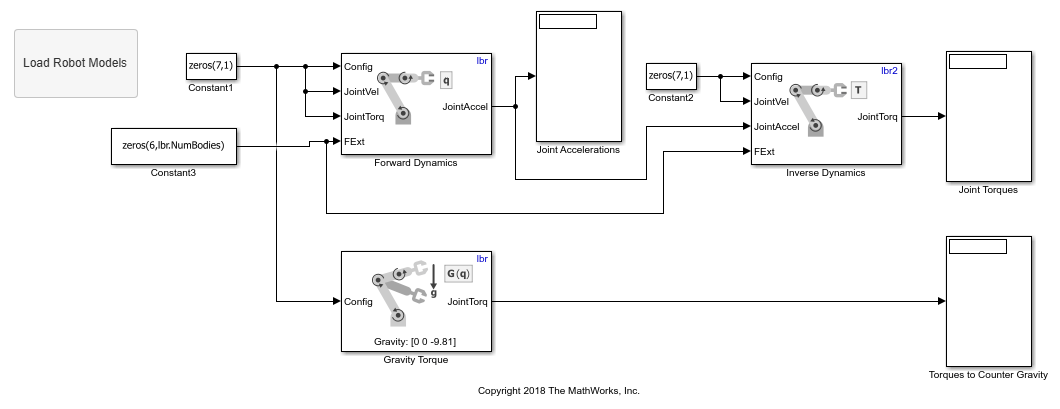
Calcular la dinámica de la gravedad del manipulador en Simulink
Utilice los bloques del algoritmo del manipulador para calcular y comparar la dinámica debida a la gravedad de un manipulador robótico.
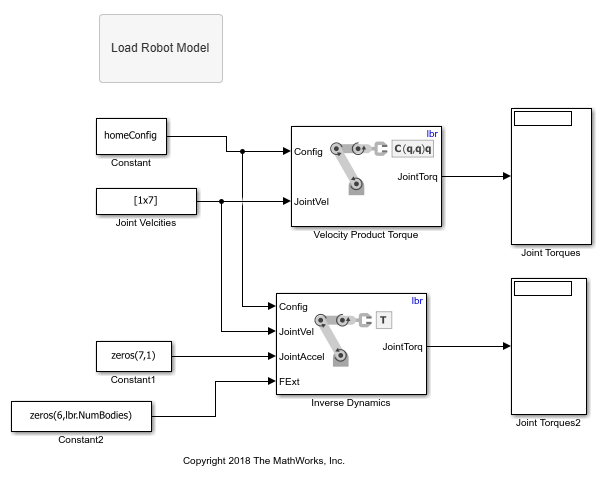
Calcular el producto de velocidad para manipuladores en Simulink
Calcule los pares motor inducidos por la velocidad de los manipuladores con bloques del algoritmo del manipulador de Simulink®.
Puertos
Entrada
Salida
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2018a
Consulte también
Bloques
- Forward Dynamics | Get Jacobian | Gravity Torque | Joint Space Mass Matrix | Velocity Product Torque