Trapezoidal Velocity Profile Trajectory
Generar trayectorias a través de múltiples waypoints con perfiles de velocidad trapezoidal
Bibliotecas:
Robotics System Toolbox /
Utilities
Descripción
El bloque Trapezoidal Velocity Profile Trajectory genera una trayectoria a través de un conjunto dado de waypoints que siguen un perfil de velocidad trapezoidal. El bloque genera posiciones, velocidades y aceleraciones para una trayectoria en función de los waypoints dados y los parámetros del perfil de velocidad.
Ejemplos
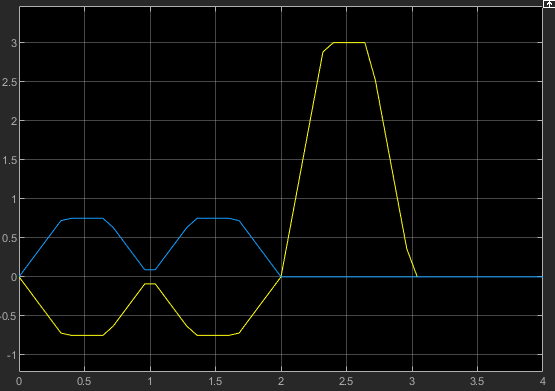
Generar una trayectoria de velocidad trapezoidal
Genere una trayectoria de velocidad trapezoidal con el bloque Trapezoidal Velocity de Simulink®.
Puertos
Entrada
Punto de tiempo a lo largo de la trayectoria, especificado como un escalar o un vector. En general, cuando se especifica como un escalar, este valor se sincroniza con el tiempo de simulación y se usa para especificar el punto de tiempo para el muestreo de la trayectoria. El bloque genera un vector de las variables de la trayectoria en ese instante de tiempo. Si el tiempo se especifica como un vector, el bloque genera una matriz con cada columna correspondiente a cada elemento del vector.
Tipos de datos: single | double
Posiciones de los waypoints de la trayectoria en puntos de tiempo determinados, especificadas como una matriz de n por p, en la que n es la dimensión de la trayectoria y p es el número de waypoints.
Dependencias
Para activar esta entrada, establezca Waypoint source en External.
Velocidad máxima del segmento de perfil, especificada como un escalar, un vector o una matriz. Esta velocidad máxima es la velocidad más alta alcanzada durante el perfil de velocidad trapezoidal.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Establezca Parameter 1 o Parameter 2 en Peak Velocity. Luego, establezca Parameter source en External.
Tipos de datos: single | double
Aceleración del perfil de velocidad, especificada como un escalar, un vector o una matriz. Esta aceleración define la aceleración constante desde la velocidad cero hasta el valor Peak velocity.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Establezca Parameter 1 o Parameter 2 en Acceleration. Luego, establezca Parameter source en External.
Tipos de datos: single | double
Duración del segmento de trayectoria, especificada como un escalar, un vector o una matriz.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Establezca Parameter 1 o Parameter 2 en End Time. Luego, establezca Parameter source en External.
Tipos de datos: single | double
Duración de la fase de aceleración del perfil de velocidad, especificada como un escalar, un vector o una matriz.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Establezca Parameter 1 o Parameter 2 en Acceleration Time. Luego, establezca Parameter source en External.
Tipos de datos: single | double
Salida
Posición de la trayectoria, especificada como escalar, vector o matriz. Si especifica un escalar para la entrada Time con una trayectoria de n dimensiones, la salida es un vector con n elementos. Si especifica un vector de m elementos para la entrada Time, la salida es una matriz de n por m.
Tipos de datos: single | double
Velocidad de la trayectoria, especificada como un escalar, vector o matriz. Si especifica un escalar para la entrada Time con una trayectoria de n dimensiones, la salida es un vector con n elementos. Si especifica un vector de m elementos para la entrada Time, la salida es una matriz de n por m.
Tipos de datos: single | double
Aceleración de la trayectoria, especificada como un escalar, vector o matriz. Si especifica un escalar para la entrada Time con una trayectoria de n dimensiones, la salida es un vector con n elementos. Si especifica un vector de m elementos para la entrada Time, la salida es una matriz de n por m.
Tipos de datos: single | double
Parámetros
Especifique External para indicar los parámetros Waypoints y Time points como entradas de bloque en lugar de parámetros de bloque.
Posiciones de los waypoints de la trayectoria en puntos de tiempo determinados, especificadas como una matriz de n por p, en la que n es la dimensión de la trayectoria y p es el número de waypoints.
Número de parámetros del perfil de velocidad, especificado como 0, 1 o 2. Al aumentar este valor se añaden Parameter 1 y Parameter 2 para especificar parámetros del perfil de velocidad.
Parámetro del perfil de velocidad, especificado como Peak Velocity, Acceleration, End Time o Acceleration Time. Al establecer este parámetro se crea un parámetro en la máscara con este valor como su nombre.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2.
Si Parameter Source se establece en Internal, este parámetro crea un parámetro en la máscara con este valor como su nombre.
Si Parameter Source se establece en External, este parámetro crea un puerto de entrada en función de este valor.
Parámetro del perfil de velocidad, especificado como Peak Velocity, Acceleration, End Time o Acceleration Time. Al establecer este parámetro se crea un parámetro en la máscara con este valor como su nombre.
Dependencias
Para activar este parámetro, establezca Number of parameters en 2.
Si Parameter Source se establece en Internal, este parámetro crea un parámetro en la máscara con este valor como su nombre.
Si Parameter Source se establece en External, este parámetro crea un puerto de entrada en función de este valor.
Especifique External para indicar los parámetros del perfil de velocidad como entradas de bloque en lugar de parámetros de bloque.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2.
Velocidad máxima del segmento de perfil, especificada como un escalar, un vector o una matriz. Esta velocidad máxima es la velocidad más alta alcanzada durante el perfil de velocidad trapezoidal.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Luego, establezca Parameter 1 o Parameter 2 en Peak Velocity.
Tipos de datos: single | double
Aceleración del perfil de velocidad, especificada como un escalar, un vector o una matriz. Esta aceleración define la aceleración constante desde la velocidad cero hasta el valor Peak velocity.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Luego, establezca Parameter 1 o Parameter 2 en Acceleration.
Tipos de datos: single | double
Duración del segmento de trayectoria, especificada como un escalar, un vector o una matriz.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Luego, establezca Parameter 1 o Parameter 2 en End Time.
Tipos de datos: single | double
Duración de la fase de aceleración del perfil de velocidad, especificada como un escalar, un vector o una matriz.
Se aplica un valor escalar a todos los elementos de la trayectoria y entre todos los waypoints. Se aplica un vector de n elementos a cada elemento de la trayectoria entre todos los waypoints. Se aplica una matriz de n por (p–1) a cada elemento de la trayectoria para cada waypoint.
Dependencias
Para activar este parámetro, establezca Number of parameters en 1 o 2. Luego, establezca Parameter 1 o Parameter 2 en Acceleration Time.
Tipos de datos: single | double
Interpreted execution: simula el modelo utilizando el intérprete MATLAB®. Esta opción reduce el tiempo de inicio, pero ofrece una velocidad de simulación inferior a la obtenida medianteCode generation. Este modo permite depurar el código fuente del bloque.Code generation: simula el modelo utilizando el código C generado. La primera vez que ejecuta una simulación, Simulink genera código C para el bloque. El código C se reutiliza en simulaciones posteriores, siempre que el modelo no cambie. Esta opción requiere tiempo de inicio adicional, pero la velocidad de las simulaciones posteriores es comparable a la obtenida medianteInterpreted execution.
Ajustable: No
Sugerencias
Para lograr un mejor rendimiento, considere estas opciones:
Reduzca el número de cambios de parámetros o waypoints.
Establezca el parámetro Waypoint source en
Internal.Establezca el parámetro Simulate using en
Code generation. Para obtener más información, consulte Interpreted Execution vs. Code Generation (Simulink).
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning and Control. Cambridge: Cambridge University Press, 2017.
[2] Spong, Mark W., Seth Hutchinson, and M. Vidyasagar. Robot Modeling and Control. John Wiley & Sons, 2006.
Capacidades ampliadas
Generación de código C/C++
Genere código C y C++ mediante Simulink® Coder™.
Historial de versiones
Introducido en R2019a
Consulte también
Bloques
Funciones
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: .
También puede seleccionar uno de estos países/idiomas:
Cómo obtener el mejor rendimiento
Seleccione China (en idioma chino o inglés) para obtener el mejor rendimiento. Los sitios web de otros países no están optimizados para ser accedidos desde su ubicación geográfica.
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)