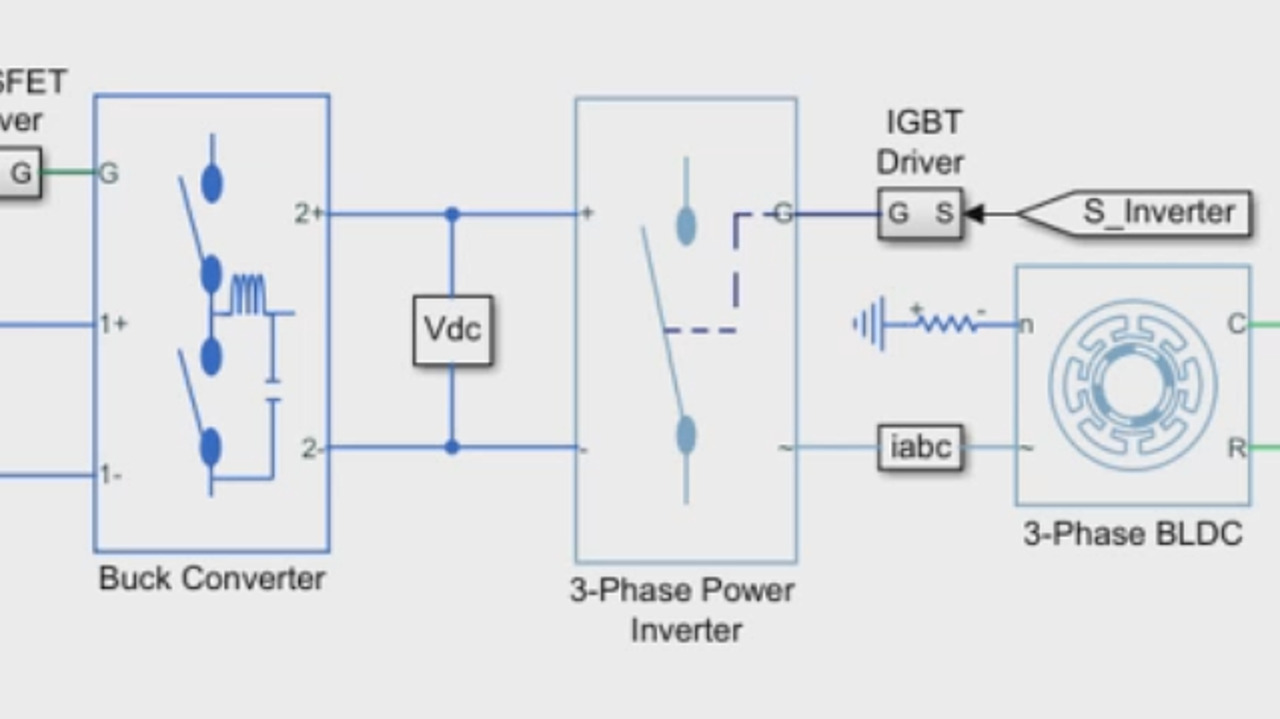
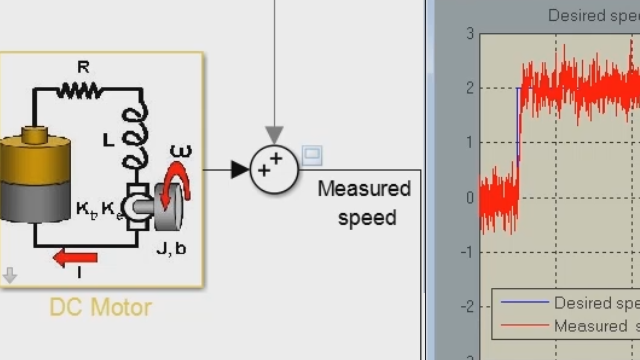
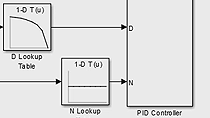
PID Control of a Brushless DC Motor
Learn how to automatically tune gains of a cascaded PID controller that controls the inner voltage and the outer speed loop of a brushless DC motor with a trapezoidal back-EMF. The three-phase BLDC motor and three-phase power inverter have been modeled in Simscape Electrical™. The goal is to tune controller gains to provide fast and stable speed response from the motor. To do that, a Closed-Loop PID Autotuner block is used. This block injects an excitation signal during closed-loop plant operation to estimate plant frequency response. The obtained frequency response is used to automatically compute PID gains. See how to use the Closed-Loop PID Autotuner on the inner voltage loop first, and then on the outer speed loop. The computed PID gains are used to update parameters of the PID controller in the model. Controller performance is verified by running closed-loop simulation.
Published: 12 Apr 2018
Related Products
Learn More
Featured Product
Simulink Control Design






Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: United States.
También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)