Modeling, Simulation, and Control
Learn how you can use MATLAB® and Simulink® to model, simulate, and control robots and unmanned vehicles. MathWorks experts and student teams share tips and tricks on getting started with using MATLAB and Simulink for Model-Based Design of robotic and unmanned systems.

Modeling and Simulation of Walking Robots
Learn how to model a bipedal walking robot using Simscape, including physical contact forces, actuator models, and controllers.

Optimizing Walking Robot Trajectories
Join Sebastian Castro as he shows you how you can use MATLAB and the Global Optimization Toolbox to find optimal motion trajectories for a Simulink model of a walking robot.

Walking Robot Pattern Generation
Learn how MATLAB and Simulink can be used to design walking pattern generators for legged humanoid robots.

Deep Reinforcement Learning for Walking Robots
Use MATLAB, Simulink, and Reinforcement Learning Toolbox to train control policies for humanoid robots using deep reinforcement learning.

Model-Based Control of Humanoid Walking
Learn how the linear inverted pendulum model (LIPM) can be used to design humanoid walking patterns in MATLAB and Simulink.

Simulating Mobile Robots with MATLAB and Simulink
Learn how to work with the Mobile Robotics Simulation Toolbox on the MATLAB Central File Exchange.

Explore how to use MATLAB and Simulink for prototyping and implementation of robot swarm behavior.

Programming Soccer Robot Behavior
Explore how to use MATLAB and Simulink for prototyping and implementation of multiagent systems through an autonomous soccer robot example.

Simulating Pneumatic Robot Actuators
Veer and Maitreyee show how you can model a pneumatic system by using physical blocks available in Simscape.

Simulating Robot Throwing Mechanisms
Veer and Maitreyee show you how to build a throwing mechanism to throw a ball at a certain target using Simscape Multibody.

Control Design for Robot Throwing Systems
Veer and Maitreyee first show how you can extend Simscape Multibody throwing mechanism models with physical effects modeled in Simscape. Later, controller is implemented in the system to track the reference piston position.

Controlling Robot Manipulator Joints
Learn how MATLAB, Simulink, and Robotics System Toolbox can help you design joint torque controllers for robotic manipulation and grasping tasks.

Trajectory Planning for Robot Manipulators
Sebastian Castro discusses how MATLAB and Simulink can help you design, plan, and verify motion trajectories for robot manipulation tasks.

System Identification of Blue Robotics Thrusters
Create a model for a piece of hardware from input and output data using the System Identification app. Connell D'Souza and Kris Fedorenko explain the workflow from data gathering to model evaluation.

LQR Control of an Autonomous Underwater Vehicle
Learn the basics of implementing a Linear-Quadratic Regulator (LQR) controller for an autonomous underwater vehicle with Juan Rojas and Nathan Liebrecht of the Autonomous Robotic Vehicle Project.
Modeling and Simulation of an Autonomous Underwater Vehicle
Yashodhar Veeralla of the Engineering Development Group at MathWorks joins Connell D’Souza to talk about using Aerospace Blockset for Model-Based Design, as well as simulation and control of an autonomous underwater vehicle (AUV).
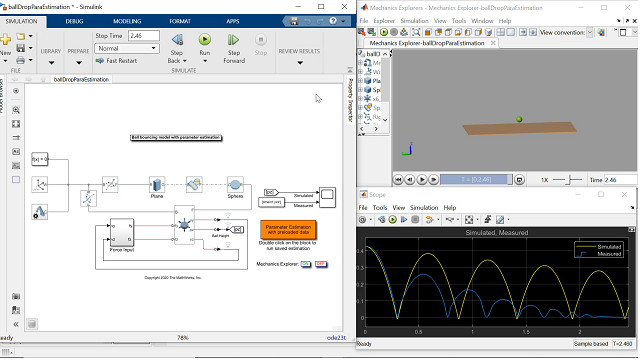
Estimating Bouncing Ball Contact Parameters
This video shows a workflow to find the optimal contact parameters that can simulate the realistic behavior of a bouncing or colliding ball using Simscape Multibody.

Designing Robot Manipulator Algorithms
Accelerate the design of robot manipulator algorithms by using the Robotics Systems Toolbox functionality and integrating robot models with simulation tools to program and test manipulation tasks.

Mapping for Mobile Robots and UGV
Learn how to create and simulate digital map representations for autonomous navigation of mobile robots and unmanned ground vehicles using MATLAB, Simulink, and ROS-enabled systems.

Create ROS Nodes for Custom SLAM Algorithms
Learn how to use online SLAM to estimate poses and continuously generate a map of an environment in real time for autonomous navigation of mobile robots using MATLAB and Simulink on a robot powered by ROS.

How to Make a Line-Following Robot Using STM32
Follow a clear, step-by-step guide to connecting STM32 and Simulink, enabling you to construct a basic line-following robot.