pidtune
Algoritmo de ajuste PID para un modelo de planta lineal
Sintaxis
Descripción
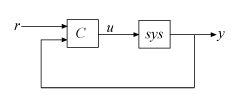
C = pidtune(sys,type)type para la planta sys. Si type especifica un controlador PID de un grado de libertad (1-DOF), el controlador se diseña para el lazo de retroalimentación unitario como se ilustra a continuación:

Si type especifica un controlador PID de dos grados de libertad (2-DOF), pidtune diseña un controlador de 2-DOF como en el lazo de retroalimentación de la siguiente ilustración:
pidtune ajusta los parámetros del controlador PID C para equilibrar el rendimiento (tiempo de respuesta) y la robustez (márgenes de estabilidad).
C = pidtune(___,opts)pidtuneOptions para especificar el conjunto de opciones opts.
Ejemplos
En este ejemplo, se muestra cómo diseñar un controlador PID para la planta dada por:
Como paso inicial, cree un modelo de la planta y diseñe un controlador PI simple para ella.
sys = zpk([],[-1 -1 -1],1);
[C_pi,info] = pidtune(sys,'PI')C_pi =
1
Kp + Ki * ---
s
with Kp = 1.14, Ki = 0.454
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 0.5205
PhaseMargin: 60.0000
C_pi es un objeto de controlador pid que representa un controlador PI. Los campos de info muestran que el algoritmo de ajuste selecciona una frecuencia de cruce de lazo cle abierto de aproximadamente 0,52 rad/s.
Examine la respuesta al escalón de lazo cerrado (seguimiento de referencia) del sistema controlado.
T_pi = feedback(C_pi*sys, 1); step(T_pi)

Para mejorar el tiempo de respuesta, puede definir una frecuencia de cruce objetivo más alta que el resultado que pidtune selecciona automáticamente, 0,52. Aumente la frecuencia de cruce a 1,0.
[C_pi_fast,info] = pidtune(sys,'PI',1.0)C_pi_fast =
1
Kp + Ki * ---
s
with Kp = 2.83, Ki = 0.0495
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 43.9973
El nuevo controlador alcanza la frecuencia de cruce más alta, pero a costa de un menor margen de fase.
Compare la respuesta al escalón de lazo cerrado con los dos controladores.
T_pi_fast = feedback(C_pi_fast*sys,1); step(T_pi,T_pi_fast) axis([0 30 0 1.4]) legend('PI','PI,fast')

Esta reducción en el rendimiento se debe a que el controlador PI no dispone de suficientes grados de libertad para alcanzar un buen margen de fase a una frecuencia de cruce de 1,0 rad/s. Si se añade una acción derivativa, se mejora la respuesta.
Diseñe un controlador PIDF para Gc con la frecuencia de cruce objetivo de 1,0 rad/s.
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)C_pidf_fast =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875
Continuous-time PIDF controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 60.0000
Los campos de información muestran que la acción derivativa del controlador permite que el algoritmo de ajuste diseñe un controlador más ajustado que alcance la frecuencia de cruce objetivo con un buen margen de fase.
Compare la respuesta al escalón de lazo cerrado y una anulación de perturbaciones en los controladores PI y PIDF rápidos.
T_pidf_fast = feedback(C_pidf_fast*sys,1); step(T_pi_fast, T_pidf_fast); axis([0 30 0 1.4]); legend('PI,fast','PIDF,fast');

Puede comparar la anulación de perturbaciones de entrada (carga) del sistema controlado con los controladores PI y PIDF rápidos. Para ello, represente la respuesta de la función de transferencia de lazo cerrado desde la entrada de la planta hasta su salida.
S_pi_fast = feedback(sys,C_pi_fast); S_pidf_fast = feedback(sys,C_pidf_fast); step(S_pi_fast,S_pidf_fast); axis([0 50 0 0.4]); legend('PI,fast','PIDF,fast');

Esta gráfica muestra que el controlador PIDF también proporciona una anulación de perturbaciones más rápida.
Diseñe un controlador PID de forma estándar para la siguiente planta.
Para diseñar un controlador de forma estándar, utilice un controlador de forma estándar como argumento C0 para pidtune.
sys = zpk([],[-1 -1 -1],1); C0 = pidstd(1,1,1); C = pidtune(sys,C0)
C =
1 1
Kp * (1 + ---- * --- + Td * s)
Ti s
with Kp = 2.18, Ti = 2.57, Td = 0.642
Continuous-time PID controller in standard form
Model Properties
Diseñe un controlador PI en tiempo discreto utilizando un método especificado para discretizar el integrador.
Si su planta es en tiempo discreto, pidtune devuelve automáticamente un controlador en tiempo discreto utilizando el método de integración estándar de Euler explícito predeterminado. Para especificar un método de integración diferente, utilice pid o pidstd para crear un controlador en tiempo discreto con el método de integración deseado.
sys = c2d(tf([1 1],[1 5 6]),0.1); C0 = pid(1,1,'Ts',0.1,'IFormula','BackwardEuler'); C = pidtune(sys,C0)
C =
Ts*z
Kp + Ki * ------
z-1
with Kp = -0.0658, Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time PI controller in parallel form.
Model Properties
Si se utiliza C0 como valor de entrada, pidtune diseña un controlador C de la misma forma, tipo y método de discretización que C0. La pantalla muestra que el término integral de C utiliza el método de integración de Euler implícito.
Especifique un integrador trapezoidal y compare el controlador resultante.
C0_tr = pid(1,1,'Ts',0.1,'IFormula','Trapezoidal'); Ctr = pidtune(sys,C0_tr)
Ctr =
Ts*(z+1)
Ki * --------
2*(z-1)
with Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time I-only controller.
Model Properties
Diseñe un controlador PID de 2-DOF para la planta dada por la función de transferencia:
Utilice un ancho de banda objetivo de 1.5 rad/s.
wc = 1.5;
G = tf(1,[1 0.5 0.1]);
C2 = pidtune(G,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
Utilizar el tipo 'PID2', pidtune genera un controlador de 2-DOF, representado como un objeto pid2. La ventana confirma este resultado. La ventana también muestra que pidtune ajusta todos los coeficientes del controlador, incluyendo los pesos de referencia b y c, para equilibrar el rendimiento y la robustez.
Argumentos de entrada
Argumentos de salida
Sugerencias
De forma predeterminada,
pidtunecon la entradatypedevuelve un controladorpidde forma paralela. Para diseñar un controlador de forma estándar, utilice un controladorpidstdcomo argumento de entradaC0. Para más información sobre las formas de controlador paralela y estándar, consulte las páginas de referencia depidypidstd.Para realizar un ajuste interactivo del PID en Live Editor, consulte la tarea Tune PID Controller de Live Editor. Esta tarea permite diseñar un controlador PID de forma interactiva y genera automáticamente código de MATLAB® para un script en vivo.
Algoritmos
Para más información sobre el algoritmo de ajuste PID de MathWorks®, consulte Algoritmo de ajuste PID.
Funcionalidad alternativa
Para realizar un ajuste interactivo del PID en Live Editor, consulte la tarea Tune PID Controller de Live Editor. Esta tarea permite diseñar un controlador PID de forma interactiva y genera automáticamente código de MATLAB para un script en vivo. Para ver un ejemplo, consulte PID Controller Design in the Live Editor
Para un ajuste interactivo del PID en una app independiente, utilice PID Tuner. Consulte Diseño de controladores PID para el seguimiento rápido de referencia para ver un ejemplo de cómo diseñar un controlador con la app.
Referencias
[1] Åström, Karl J., and Tore Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA-The Instrumentation, Systems, and Automation Society, 2006.
Historial de versiones
Introducido en R2010b