invert
Invertir la transformación geométrica
Sintaxis
Descripción
Ejemplos
Lea y muestre una imagen.
I = imread("pout.tif");
imshow(I)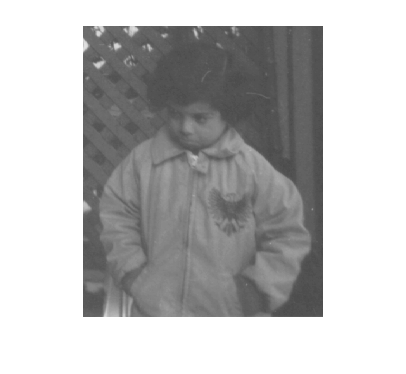
Cree un objeto rigidtform2d que defina una rotación de 30 grados en el sentido de las agujas del reloj alrededor del origen.
translation = [0 0]; theta = 30; tform = rigidtform2d(theta,translation);
Aplique la transformación geométrica directa, tform, a la imagen. Muestre la imagen rotada.
J = imwarp(I,tform); imshow(J)

Invierta la transformación geométrica. El resultado es un objeto rigidtform2d nuevo que representa una rotación de 30 grados en sentido contrario a las agujas del reloj.
invtform = invert(tform);
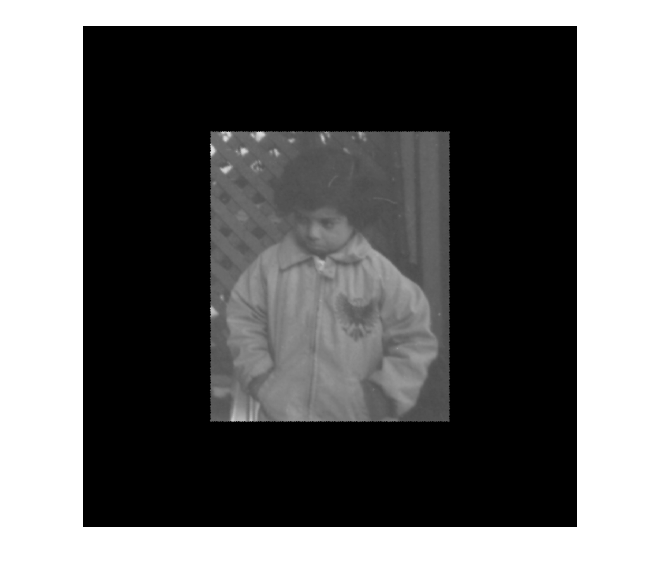
Aplique la transformación geométrica inversa, invtform, a la imagen rotada J. La imagen final, K, tiene el mismo tamaño, forma y orientación que la imagen original. El relleno negro alrededor de la imagen se debe a las dos transformaciones.
K = imwarp(J,invtform); imshow(K)