AHRS
Orientación a partir de lecturas de acelerómetro, giroscopio y magnetómetro

Bibliotecas:
Navigation Toolbox /
Multisensor Positioning /
Navigation Filters
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Navigation Filters
Descripción
El bloque AHRS Simulink® fusiona datos del sensor acelerómetro, magnetómetro y giroscopio para estimar la orientación del dispositivo.
Ejemplos

Fusión de sensores IMU con Simulink
Este ejemplo muestra cómo generar y fusionar datos del sensor IMU utilizando Simulink®. Puede modelar con precisión el comportamiento de un acelerómetro, un giroscopio y un magnetómetro y fusionar sus salidas para calcular la orientación.
Puertos
Entrada
Salida
Parámetros
Algoritmos
Nota: El siguiente algoritmo sólo se aplica a un marco de referencia NED.
El bloque AHRS utiliza la estructura de filtro Kalman de nueve ejes descrita en [1]. El algoritmo intenta rastrear los errores de orientación, desplazamiento del giroscopio, aceleración lineal y perturbación magnética para generar la orientación final y la velocidad angular. En lugar de rastrear la orientación directamente, el filtro Kalman indirecto modela el proceso de error, x, con una actualización recursiva:
donde xk es un vector de 12 por 1 que consta de:
θk –– Vector de error de orientación de 3 por 1, en grados, en el tiempo k
bk –– Vector de sesgo de velocidad angular cero del giroscopio 3 por 1, en grados/s, en el momento k
ak –– Vector de error de aceleración de 3 por 1 medido en el marco del sensor, en g, en el tiempo k
dk –– Vector de error de perturbación magnética de 3 por 1 medido en el marco del sensor, en µT, en el tiempo k
y donde wk es un vector de ruido aditivo de 12 por 1, y Fk es el modelo de transición de estado.
Dado que xk se define como el proceso de error, la estimación a priori siempre es cero y, por lo tanto, el modelo de transición de estado, Fk, es cero. Esta idea da como resultado la siguiente reducción de las ecuaciones estándar de Kalman:
Ecuaciones de Kalman estándar:
Ecuaciones de Kalman utilizadas en este algoritmo:
donde:
xk− –– estimación del estado predicho (a priori); el proceso de error
Pk− –– estimación de covarianza prevista (a priori)
yk –– innovación
Sk –– covarianza de la innovación
Kk –– Ganancia de Kalman
xk+ –– estimación de estado actualizada (a posteriori)
Pk+ –– estimación de covarianza actualizada (a posteriori)
k representa la iteración, el superíndice + representa una estimación a posteriori y el superíndice − representa una estimación a priori.
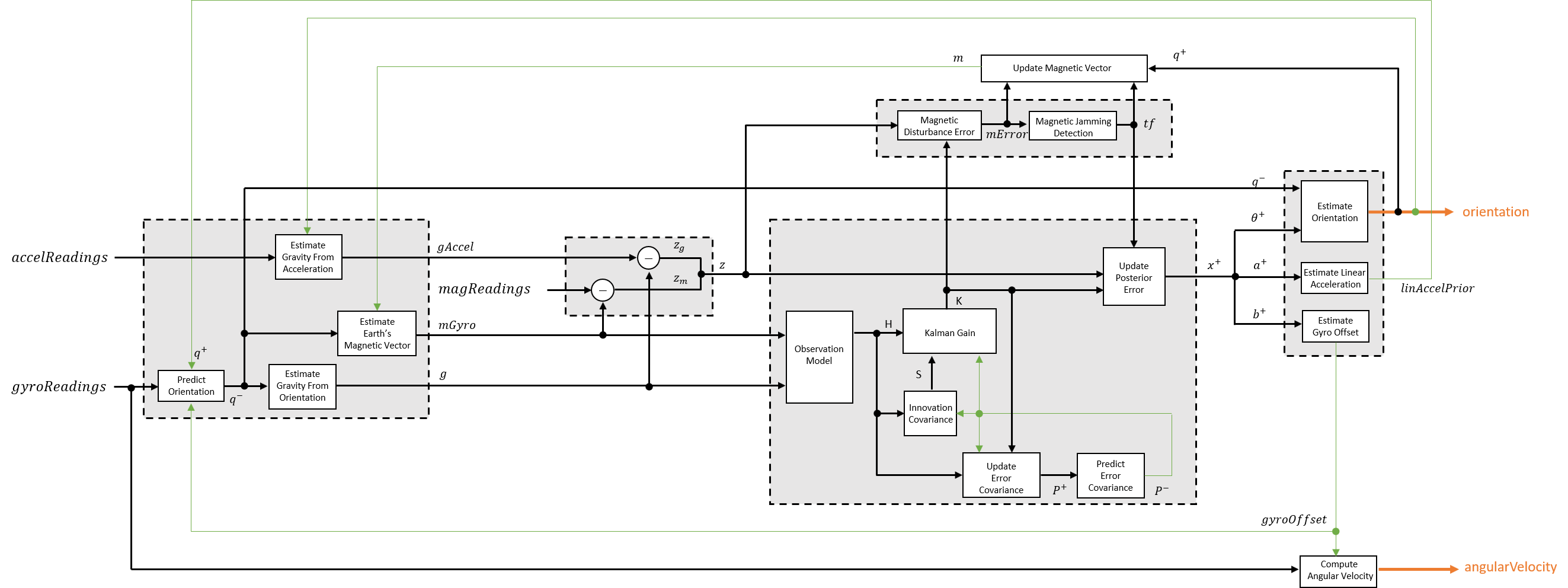
El gráfico y los siguientes pasos describen una iteración basada en un solo cuadro a través del algoritmo.
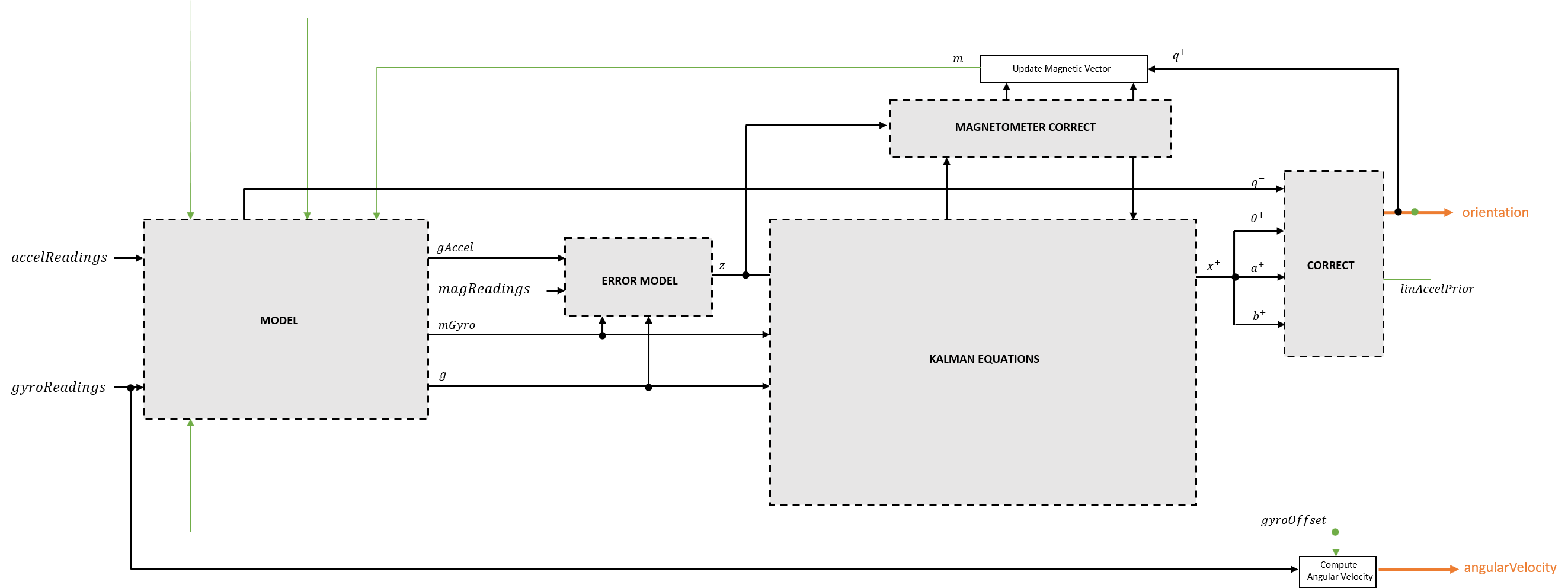
Antes de la primera iteración, las entradas accelReadings, gyroReadings y magReadings se dividen en cuadros DecimationFactor por 3. Para cada fragmento, el algoritmo utiliza las lecturas más actuales del acelerómetro y magnetómetro correspondientes al fragmento de lecturas del giroscopio.
Lea el algoritmo para obtener una explicación de cada etapa de la descripción detallada.
El algoritmo modela la aceleración y el cambio angular como procesos lineales.
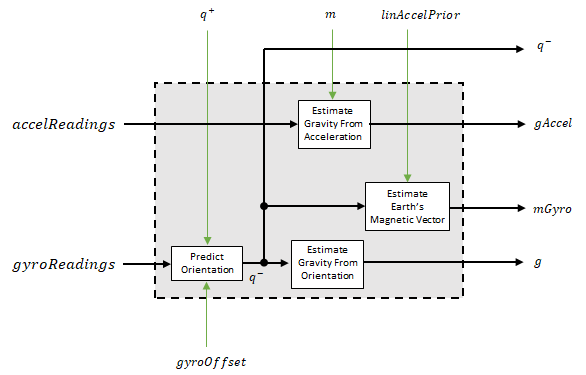
La orientación del cuadro actual se predice estimando primero el cambio angular respecto del cuadro anterior:
donde N es el factor de diezmado especificado por el factor de diezmado y fs es la frecuencia de muestreo.
El cambio angular se convierte en cuaterniones utilizando la sintaxis de construcción rotvec quaternion:
La estimación de orientación anterior se actualiza girándola por Δ Q:
Durante la primera iteración, la estimación de orientación, q−, se inicializa mediante ecompass.
El vector de gravedad se interpreta como la tercera columna del cuaternión, q−, en forma de matriz de rotación:
Se realiza una segunda estimación del vector de gravedad restando la estimación de aceleración lineal decaida de la iteración anterior de las lecturas del acelerómetro:
El vector magnético de la Tierra se estima rotando la estimación del vector magnético de la iteración anterior por la estimación de orientación a priori, en forma de matriz de rotación:
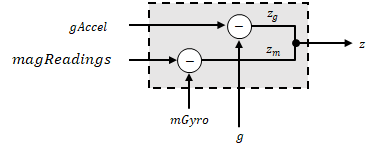
El modelo de error combina dos diferencias:
La diferencia entre la estimación de la gravedad a partir de las lecturas del acelerómetro y la estimación de la gravedad a partir de las lecturas del giroscopio:
La diferencia entre la estimación del vector magnético a partir de las lecturas del giroscopio y la estimación del vector magnético a partir del magnetómetro:
El magnetómetro calcula correctamente el error en la estimación del vector magnético y detecta interferencias magnéticas.

El error de perturbación magnética se calcula multiplicando la matriz de la ganancia de Kalman asociada al vector magnético con la señal de error:
La ganancia de Kalman, K, es la ganancia de Kalman calculada en la iteración actual.
La interferencia magnética se determina verificando que la potencia de la perturbación magnética detectada sea menor o igual a cuatro veces la potencia de la intensidad del campo magnético esperado:
ExpectedMagneticFieldStrength es una propiedad de ahrsfilter.
Las ecuaciones de Kalman utilizan la estimación de gravedad derivada de las lecturas del giroscopio, g, la estimación del vector magnético derivada de las lecturas del giroscopio, mGyro, y la observación del proceso de error, z, para actualizar las matrices de ganancia de Kalman y de covarianza intermedia. La ganancia de Kalman se aplica a la señal de error, z, para generar una estimación de error a posteriori, x+.
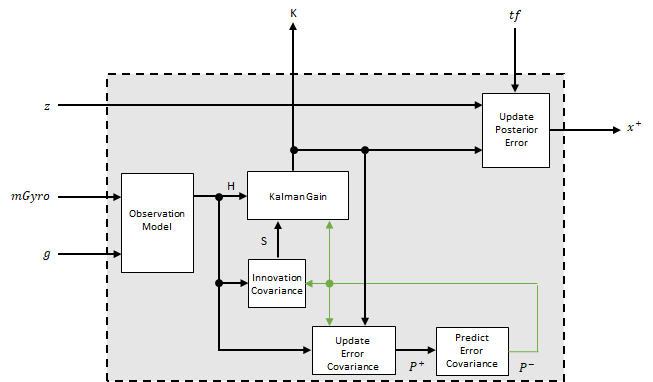
El modelo de observación asigna los estados observados de 1 por 3, g y mGyro, al estado real de 6 por 12, H.
El modelo de observación se construye como:
donde gx, gy y gz son los elementos x, y y z del vector de gravedad estimado a partir de la orientación a priori, respectivamente. mx, my y mz son los elementos x, y y z del vector magnético estimado a partir de la orientación a priori, respectivamente. κ es una constante determinada por las propiedades de frecuencia de muestreo y factor de diezmado: κ = Decimation factor/Sample rate.
La covarianza de innovación es una matriz de 6 por 6 que se utiliza para rastrear la variabilidad en las mediciones. La matriz de covarianza de innovación se calcula como:
donde
H es la matriz del modelo de observación
P− es la estimación predicha (a priori) de la covarianza del modelo de observación calculado en la iteración anterior
R es la covarianza del ruido del modelo de observación, calculada como:
donde
y
La covarianza de la estimación del error es una matriz de 12 por 12 que se utiliza para rastrear la variabilidad en el estado.
La matriz de covarianza de estimación de error se actualiza como:
donde K es la ganancia de Kalman, H es la matriz de medición y P− es la covarianza de estimación de error calculada durante la iteración anterior.
La covarianza de la estimación del error es una matriz de 12 por 12 que se utiliza para rastrear la variabilidad en el estado. La covarianza de estimación de error a priori, P−, se establece en la covarianza de ruido del proceso, Q, determinada durante la iteración anterior. Q se calcula como una función de la covarianza de estimación de error a posteriori, P+. Al calcular Q, se supone que los términos de correlación cruzada son insignificantes en comparación con los términos de autocorrelación y se establecen en cero:
dónde
P+ –– es la covarianza de estimación de error actualizada (a posteriori)
κ –– Factor de diezmado dividido por la frecuencia de muestreo.
β –– Ruido de deriva del giroscopio.
η –– Ruido del giroscopio.
ν –– Factor de disminución de la aceleración lineal.
ξ –– Ruido de aceleración lineal.
σ –– Factor de decaimiento por perturbación magnética.
γ –– Ruido de perturbación magnética.
La matriz de ganancia de Kalman es una matriz de 12 por 6 que se utiliza para ponderar la innovación. En este algoritmo, la innovación se interpreta como el proceso de error, z.
La matriz de ganancia de Kalman se construye como:
donde
P− –– covarianza del error previsto
H –– modelo de observación
S –– covarianza de la innovación
La estimación del error a posterior se determina combinando la matriz de ganancia de Kalman con el error en las estimaciones del vector de gravedad y del vector magnético:
Si se detecta interferencia magnética en la iteración actual, se ignora la señal de error del vector magnético y la estimación del error a posterior se calcula como:
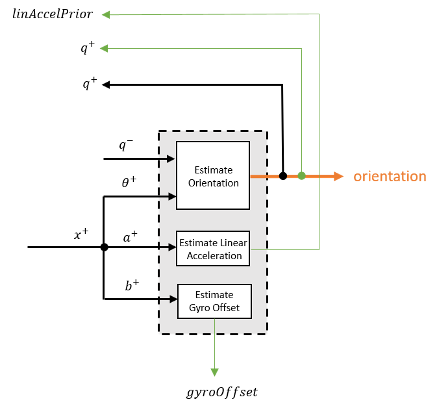
La estimación de orientación se actualiza multiplicando la estimación anterior por el error:
La estimación de la aceleración lineal se actualiza decayendo la estimación de la aceleración lineal de la iteración anterior y restando el error:
donde
ν –– Factor de decaimiento de la aceleración lineal
La estimación del desplazamiento del giroscopio se actualiza restando el error de desplazamiento del giroscopio del desplazamiento del giroscopio de la iteración anterior:
Referencias
[1] Open Source Sensor Fusion. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., H.J. Luinge, C.T.M. Baten, and P.H. Veltink. "Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation." IEEE Transactions on Neural Systems and Rehabilitation Engineering. Vol. 13. Issue 3, 2005, pp. 395-405.
Capacidades ampliadas
Historial de versiones
Introducido en R2020a
Consulte también
ahrsfilter | ecompass | imufilter | imuSensor | gpsSensor