show
Mostrar cuerpos del ego y obstáculos en el entorno.
Descripción
ax = show(capsuleListObj)
ax = show(capsuleListObj,Name,Value)'FastUpdate',true permite actualizaciones rápidas de un gráfico existente.
Ejemplos
Construya una ruta del cuerpo del ego y mantenga los estados de obstáculo utilizando el objeto dynamicCapsuleList. Visualice los estados de todos los objetos del entorno en diferentes marcas de tiempo. Valide la ruta del cuerpo del ego comprobando colisiones con obstáculos en el entorno.
Cree el objeto dynamicCapsuleList. Extraiga la cantidad máxima de pasos para usar como cantidad de marcas de tiempo para las rutas de sus objetos.
obsList = dynamicCapsuleList; numSteps = obsList.MaxNumSteps;
Añadir cuerpo del ego
Defina un cuerpo del ego especificando la identificación, la geometría y el estado juntos en una estructura. La geometría de la cápsula tiene una longitud de 3 my un radio de 1 m. Especifique el estado como una ruta lineal desde x = 0m hasta x = 100m.
egoID1 = 1; geom = struct("Length",3,"Radius",1,"FixedTransform",eye(3)); states = linspace(0,1,obsList.MaxNumSteps)'.*[100 0 0]; egoCapsule1 = struct('ID',egoID1,'States',states,'Geometry',geom); addEgo(obsList,egoCapsule1); show(obsList,"TimeStep",[1:numSteps]); ylim([-20 20])

Agregar obstáculos
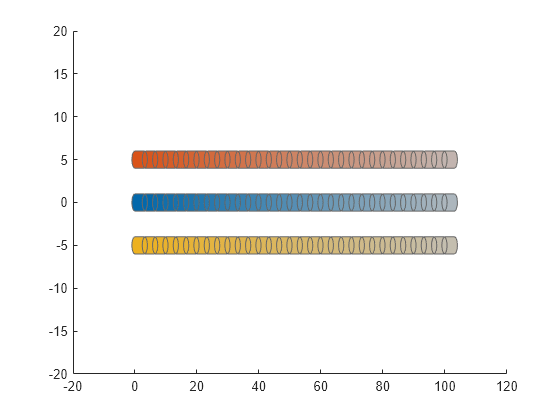
Especifique estados para dos obstáculos que están separados del cuerpo del ego por 5 m en direcciones opuestas en el eje y. Supongamos que los obstáculos tienen la misma geometría geom que el cuerpo del ego.
obsState1 = states + [0 5 0]; obsState2 = states + [0 -5 0]; obsCapsule1 = struct('ID',1,'States',obsState1,'Geometry',geom); obsCapsule2 = struct('ID',2,'States',obsState2,'Geometry',geom); addObstacle(obsList,obsCapsule1); addObstacle(obsList,obsCapsule2); show(obsList,"TimeStep",[1:numSteps]); ylim([-20 20])
Actualizar obstáculos
Modifique las ubicaciones de los obstáculos y las dimensiones geométricas con el tiempo. Utilice la estructura generada previamente, modifique los campos y actualice los obstáculos utilizando las funciones de objeto updateObstacleGeometry y updateObstaclePose. Reduce el radio del primer obstáculo a 0,5 m y cambia la ruta para moverlo hacia el cuerpo del ego.
obsCapsule1.Geometry.Radius = 0.5; obsCapsule1.States = ... [linspace(0,100,numSteps)' ... % x linspace(5,-4,numSteps)' ... % y zeros(numSteps,1)]; % theta updateObstacleGeometry(obsList,1,obsCapsule1); updateObstaclePose(obsList,1,obsCapsule1);
Comprobar si existen colisiones
Visualiza los nuevos rutas. Muestra dónde ocurren las colisiones entre el cuerpo del ego y un obstáculo, que la pantalla resalta en rojo. Tenga en cuenta que las colisiones entre los obstáculos no se controlan.
show(obsList,"TimeStep",[1:numSteps],"ShowCollisions",1); ylim([-20 20]) xlabel("X (m)") ylabel("Y (m)")

Verifique programáticamente si hay colisiones utilizando la función de objeto checkCollision. La función devuelve un vector de valores lógicos que indica el estado de cada paso de tiempo. El vector se transpone con fines de visualización.
collisions = checkCollision(obsList)'
collisions = 1×31 logical array
0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0
Para validar rutas con una gran cantidad de pasos, utilice la función any en el vector de valores de colisión.
if any(collisions) disp("Collision detected.") end
Collision detected.
Actualizar ruta del ego
Especifica una ruta nueva para el cuerpo del ego. Visualice las rutas nuevamente, mostrando colisiones.
egoCapsule1.States = ... [linspace(0,100,numSteps)' ... % x 3*sin(linspace(0,2*pi,numSteps))' ... % y zeros(numSteps,1)]; % theta updateEgoPose(obsList,1,egoCapsule1); show(obsList,"TimeStep",[1:numSteps],"ShowCollisions",1); ylim([-20 20])

Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2020b