bodemag
Diagrama de Bode de solo magnitud de la respuesta en frecuencia
Sintaxis
Descripción
bodemag permite generar gráficas de solo magnitud para visualizar la respuesta en frecuencia de magnitudes de un sistema dinámico.
Para una función más completa, consulte bode. bode proporciona información de magnitud y de fase. Si tiene System Identification™ Toolbox, bode también devuelve los valores calculados, incluidas estimaciones estadísticas.
Para más opciones de representación personalizables, consulte bodeplot.
bodemag( crea una gráfica de magnitud de Bode de la respuesta en frecuencia del modelo de sistema dinámico sys)sys. El diagrama muestra la magnitud (en dB) de la respuesta del sistema como una función de frecuencia. bodemag determina automáticamente las frecuencias que se van a representar en función de la dinámica del sistema.
Si sys es un modelo con múltiples entradas y múltiples salidas (MIMO), bodemag crea un arreglo de gráficas de magnitud de Bode en el que cada gráfica muestra la respuesta en frecuencia de un par de E/S.
Si sys es un modelo con coeficientes complejos, entonces:
En la escala de frecuencia logarítmica, el diagrama muestra dos ramas, una para frecuencias positivas y otra para frecuencias negativas. El diagrama también muestra flechas que indican la dirección de los valores de frecuencia que aumentan para cada rama. Consulte Diagrama de Bode de un modelo con coeficientes complejos.
La escala de frecuencia lineal, el diagrama muestra una única rama con un rango de frecuencia simétrico centrado en un valor de frecuencia de cero.
Ejemplos
Cree una gráfica de magnitud de Bode del siguiente sistema dinámico SISO en tiempo continuo.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); bodemag(H)
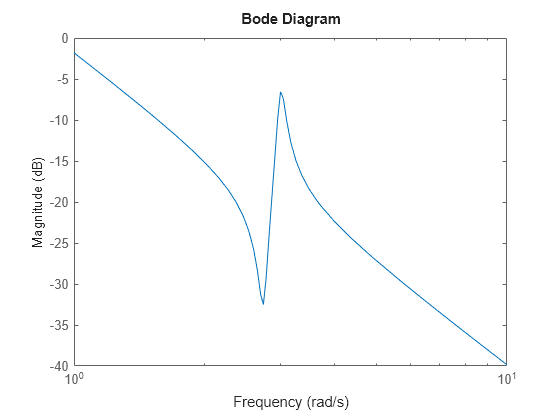
bodemag selecciona automáticamente el rango del diagrama en función de la dinámica del sistema.
Cree una gráfica de magnitud de Bode a lo largo de un rango de frecuencia especificado. Utilice este enfoque cuando desee centrarse en la dinámica de un rango de frecuencia en particular.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
bodemag(H,{1,100})
grid on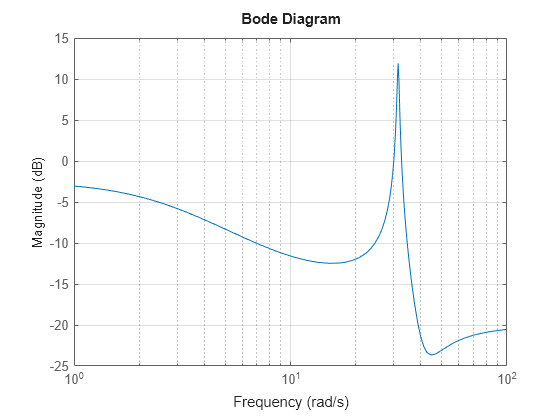
El arreglo de celdas {1,100} especifica el valor de frecuencia mínimo y máximo de la gráfica de magnitud de Bode. Cuando establece límites de frecuencia de esta manera, la función selecciona los puntos intermedios para los datos de respuesta en frecuencia.
Como alternativa, especifique un vector de puntos de frecuencia para utilizar cuando evalúe y represente la respuesta en frecuencia.
w = [1 5 10 15 20 23 31 40 44 50 85 100]; bodemag(H,w,'.-') grid on

bodemag representa la respuesta en frecuencia solo en las frecuencias especificadas.
Compare la magnitud de la respuesta en frecuencia de un sistema en tiempo continuo con un sistema discretizado equivalente en el mismo diagrama de Bode.
Cree sistemas dinámicos en tiempo continuo y tiempo discreto.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Cree una gráfica de magnitud de Bode que muestre las respuestas de ambos sistemas.
bodemag(H,Hd)
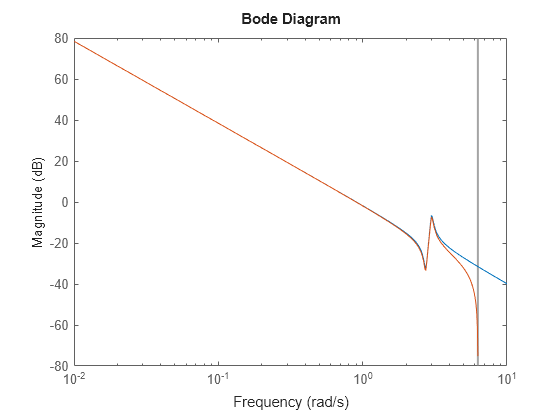
La gráfica de magnitud de Bode de un sistema en tiempo discreto incluye una línea vertical que marca la frecuencia Nyquist del sistema.
Especifique el color, el estilo de línea o el marcador para cada sistema de una gráfica de magnitud de Bode utilizando los argumentos de entrada LineSpec.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); bodemag(H,'r',Hd,'b--')
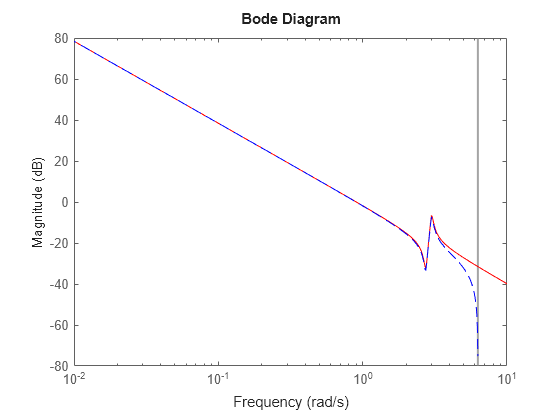
El primer argumento LineSpec, 'r', especifica una línea continua roja para la respuesta de H. El segundo argumento LineSpec, 'b--', especifica una línea discontinua azul para la respuesta de Hd.
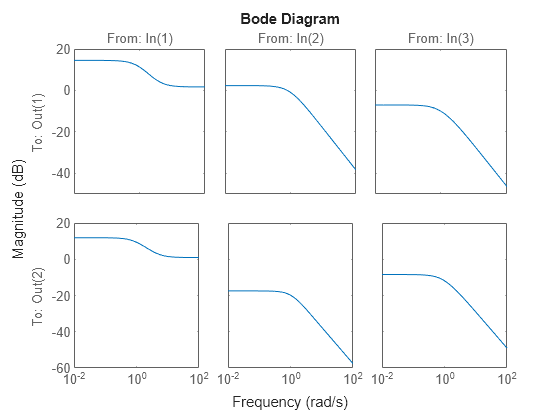
Para este ejemplo, cree un sistema de dos salidas y tres entradas.
rng(0,'twister'); % For reproducibility H = rss(4,2,3);
En este sistema, bodemag representa las respuestas en frecuencia de solo magnitud de cada canal de E/S en un diagrama diferente y en una única figura.
bodemag(H)
Argumentos de entrada
Algoritmos
El software calcula la respuesta en frecuencia de la siguiente forma:
Calcule la representación de cero-polo-ganancia (
zpk) del sistema dinámico.Evalúe la ganancia y la fase de la respuesta en frecuencia en función de los datos de ceros, polos y ganancia para cada canal de entrada-salida del sistema.
En el caso de sistemas en tiempo continuo, la función
bodemagevalúa la respuesta en frecuencia en el eje imaginario s = jω y tiene en cuenta solo frecuencias positivas.En el caso de sistemas en tiempo discreto, la función
bodemagevalúa la respuesta en frecuencia en el círculo unitario. Para facilitar la interpretación, el comando parametriza la mitad superior del círculo unitario como:donde Ts es el tiempo de muestreo y ωN es la frecuencia Nyquist. A continuación, el software utiliza la frecuencia en tiempo continuo equivalente ω como variable del eje x. Dado que es periódico con periodo 2 ωN, la función
bodemagrepresenta la respuesta solo hasta la frecuencia Nyquist ωN. Sisyses un modelo en tiempo discreto con un tiempo de muestreo no especificado, la funciónbodemagutiliza Ts = 1.
Funcionalidad alternativa
También puede crear una respuesta en frecuencia de solo magnitud utilizando bodeplot. Para ello, establezca la propiedad PhaseVisible del objeto bodeplot en "off".
bp = bodeplot(sys);
bp.PhaseVisible = "off";Historial de versiones
Introducido en R2012a