bwpropfilt
Extraer objetos de una imagen binaria usando propiedades
Sintaxis
Descripción
Objetos en imágenes binarias
Ejemplos
Lea una imagen y muéstrela.
BW = imread('text.png'); figure imshow(BW) title('Original Image')
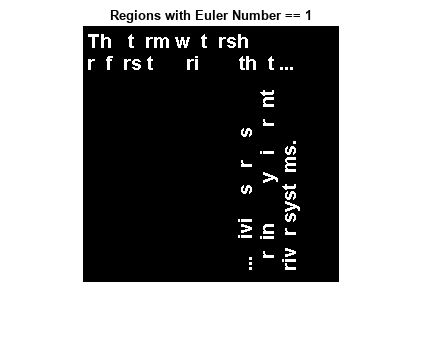
Utilice el filtrado para crear una segunda imagen que contenga solo las regiones de la imagen original que no tengan huecos. En estas regiones, la propiedad del número de Euler es igual a 1. Muestre la imagen filtrada.
BW2 = bwpropfilt(BW,'EulerNumber',[1 1]); figure imshow(BW2) title('Regions with Euler Number == 1')
Lea una imagen.
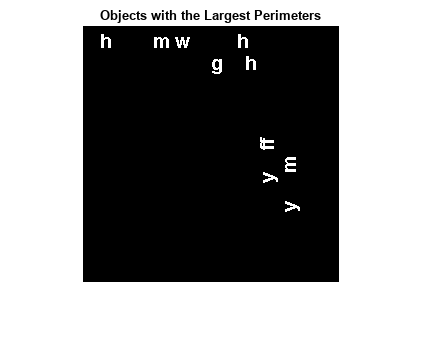
BW = imread('text.png');Encuentre los diez objetos de la imagen que tienen los perímetros más grandes y muestre la imagen filtrada.
BW2 = bwpropfilt(BW,'perimeter',10); figure; imshow(BW2) title('Objects with the Largest Perimeters')
Lea y muestre una imagen.
I = imread("blobs.png");
imshow(I)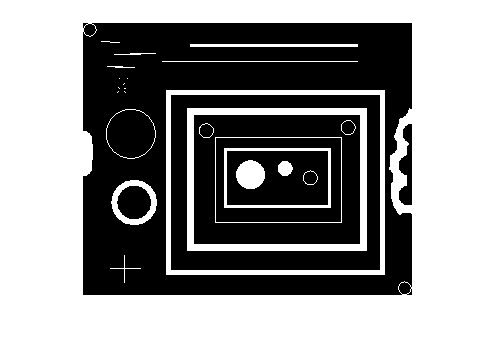
Cree una estructura de componentes conectados.
CC = bwconncomp(I);
Filtre la estructura y conserve los objetos redondos. Muestre la imagen filtrada.
CC = bwpropfilt(CC,"Circularity",[0.7 1]);
imshow(cc2bw(CC))
Filtre de nuevo la estructura y conserve los objetos grandes. Muestre la imagen filtrada.
CC = bwpropfilt(CC,"Area",[20 Inf]);
imshow(cc2bw(CC))
Argumentos de entrada
Imagen binaria que se desea filtrar, especificada como matriz lógica.
bwpropfilt busca los componentes conectados dentro de la imagen usando la función bwconncomp.
Tipos de datos: logical
Componentes conectados que se desea filtrar, especificados como estructura. Puede obtener una estructura de componentes conectados a partir de una imagen binaria usando la función bwconncomp.
Tipos de datos: struct
Nombre de la propiedad por la que filtrar, especificado como uno de estos valores.
Mediciones del valor de los píxeles
| Nombre de la propiedad | Descripción |
|---|---|
"Area" | Número de píxeles de la región. |
"Circularity" | Redondez de un objeto. El valor de circularidad se calcula como:
El valor de circularidad máximo es 1. |
"ConvexArea" | Número de píxeles de la envolvente convexa. La envolvente convexa es el polígono convexo más pequeño que puede contener la región. Para obtener más información sobre la clasificación de los píxeles en el límite de la envolvente, consulte Classify Pixels That Are Partially Enclosed by ROI. |
"Eccentricity" | Excentricidad de la elipse que tiene los mismos segundos momentos que la región. La excentricidad es la relación entre la distancia entre los focos de la elipse y la longitud de su eje mayor. Los valores son números en el intervalo [0, 1]. (0 y 1 son casos degenerados. Una elipse cuya excentricidad es 0 es en realidad un círculo, mientras que una elipse cuya excentricidad es 1 es un segmento de recta) |
"EquivDiameter" | Diámetro (en píxeles) de un círculo con la misma área que la región, calculado como sqrt(4*Area/pi). |
"EulerNumber" | Número de Euler (también conocido como la característica de Euler), calculado como 1 menos el número de huecos de la región. |
"Extent" | Relación entre los píxeles de la región y los píxeles del cuadro delimitador total, calculada como Area dividida por el área del cuadro delimitador. |
"FilledArea" | Número de píxeles de la región después de llenar todos los huecos que hay en ella. |
"MajorAxisLength" | Longitud (en píxeles) del eje mayor de la elipse que tiene los mismos segundos momentos centrales normalizados que la región. |
"MinorAxisLength" | Longitud (en píxeles) del eje menor de la elipse que tiene los mismos segundos momentos centrales normalizados que la región. |
"Orientation" | Ángulo (en grados) entre el eje x y el eje mayor de la elipse que tiene los mismos segundos momentos que la región. El valor está en el intervalo (–90, 90]. Esta figura ilustra los ejes y la orientación de la elipse. La parte izquierda de la figura muestra una región de la imagen y su correspondiente elipse. El lado derecho muestra la misma elipse con las líneas azules sólidas que representan los ejes. Los puntos rojos son los focos. La orientación es el ángulo entre la línea de puntos horizontal y el eje mayor.
|
"Perimeter" | Distancia (en píxeles) alrededor del límite de la región, calculada sumando la distancia entre cada par de píxeles contiguos alrededor del borde de la región. Esta figura ilustra los píxeles incluidos en el cálculo del perímetro para una región de muestra.
|
"Solidity" | Proporción de los píxeles de la envolvente convexa que también están en la región, calculada como Area/ConvexArea. |


Puede especificar una propiedad de medición de los valores de píxeles de esta tabla cuando incluya una imagen de marcador, I, como un argumento de entrada para la función.
Mediciones del valor de los píxeles
| Nombre de la propiedad | Descripción |
|---|---|
"MaxIntensity" | Valor del píxel con la mayor intensidad de la región. |
"MeanIntensity" | Media de todos los valores de intensidad de la región. |
"MinIntensity" | Valor del píxel con la menor intensidad de la región. |
Tipos de datos: char | string
Valores mínimo y máximo de la propiedad, especificados como un vector numérico de 2 elementos con forma [low high]. Los valores deben ser no decrecientes.
Tipos de datos: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Número de objetos que devolver, especificado como número entero positivo.
Tipos de datos: double
Objetos que conservar, especificados como "largest" o "smallest".
Tipos de datos: char | string
Imagen de marcador, especificada como imagen en escala de grises. Los valores de intensidad de la imagen en escala de grises definen regiones en la imagen binaria de entrada. La imagen de marcador debe tener el mismo tamaño que la imagen binaria BW o coincidir con el campo ImageSize de la estructura componentes conectados.
Tipos de datos: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Conectividad de píxeles, especificada como uno de estos valores.
Valor | Significado | |
|---|---|---|
Conectividades bidimensionales | ||
| Los píxeles se consideran conectados si comparten bordes. Dos píxeles contiguos forman parte del mismo objeto si ambos se encuentran y están conectados a lo largo de la dirección horizontal o vertical. |
El píxel actual se muestra en gris. |
| Los píxeles se consideran conectados si comparten bordes o vértices. Dos píxeles contiguos forman parte del mismo objeto si ambos se encuentran y están conectados a lo largo de la dirección horizontal, vertical o diagonal. |
El píxel actual se muestra en gris. |


La conectividad puede definirse de una forma más general especificando una matriz de 3 por 3 de valores 0 y 1. Los elementos con el valor 1 definen los entornos relativos al elemento central de conn. La matriz debe ser simétrica respecto de su elemento central.
Tipos de datos: double | logical
Argumentos de salida
Sugerencias
bwpropfiltcalcula las propiedades de los componentes conectados usando la funciónregionprops.Para filtrar en múltiples propiedades de la imagen de forma eficiente, llame a
bwpropfiltvarias veces utilizando la misma estructura de componentes conectados.
Capacidades ampliadas
Historial de versiones
Introducido en R2014bConsulte también
Image Region Analyzer | regionprops | bwareafilt | bwareaopen | bwconncomp | conndef | cc2bw