lsqcurvefit
Resolver problemas de ajuste de curvas (ajuste de datos) no lineales en el sentido de mínimos cuadrados
Sintaxis
Descripción
Solver de mínimos cuadrados no lineales
Encuentre coeficientes x que resuelven el problema
dados los datos de entrada xdata y la salida observada ydata, donde xdata e ydata son matrices o vectores, y F (x, xdata) es una función con valores matriciales o vectoriales del mismo tamaño que ydata.
Opcionalmente, los componentes de x están sujetos a restricciones.
Los argumentos x, lb y ub pueden ser vectores o matrices; consulte Argumentos de matriz.
La función lsqcurvefit utiliza el mismo algoritmo que lsqnonlin. lsqcurvefit simplemente proporciona una interfaz práctica para problemas de ajuste de datos.
En lugar de calcular la suma de cuadrados, lsqcurvefit requiere que la función que define el usuario calcule la función de valor vectorial
x = lsqcurvefit(fun,x0,xdata,ydata)x0 y encuentra los coeficientes x que mejor ajustan la función no lineal fun(x,xdata) a los datos ydata (en el sentido de mínimos cuadrados). ydata debe ser del mismo tamaño que el vector (o la matriz) F que devuelve fun.
Nota
Pasar parámetros adicionales explica cómo pasar parámetros adicionales a la función vectorial fun(x), si fuera necesario.
x = lsqcurvefit(fun,x0,xdata,ydata,lb,ub)x, de modo que la solución siempre se encuentra en el rango lb ≤ x ≤ ub. Puede fijar el componente de la solución x(i) especificando lb(i) = ub(i).
Nota
Si los límites de entrada especificados para un problema son inconsistentes, la salida x es x0 y las salidas resnorm y residual son [].
Los componentes de x0 que vulneran los límites lb ≤ x ≤ ub se restablecen al interior del cuadro definido por los límites. Los componentes que respetan los límites no se cambian.
x = lsqcurvefit(fun,x0,xdata,ydata,lb,ub,options)x = lsqcurvefit(fun,x0,xdata,ydata,lb,ub,A,b,Aeq,beq,nonlcon,options)options. Utilice optimoptions para configurar estas opciones. Pase matrices vacías para lb y ub y para otros argumentos de entrada si los argumentos no existen.
Ejemplos
Suponga que tiene datos de tiempo de observación xdata y datos de respuesta observada ydata, y desea encontrar parámetros y para ajustar un modelo con el formato
Introduzca los tiempos de observación y las respuestas.
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
Cree un modelo de decaimiento exponencial simple.
fun = @(x,xdata)x(1)*exp(x(2)*xdata);
Ajuste el modelo utilizando el punto de inicio x0 = [100,-1].
x0 = [100,-1]; x = lsqcurvefit(fun,x0,xdata,ydata)
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
x = 1×2
498.8309 -0.1013
Represente los datos y la curva ajustada.
times = linspace(xdata(1),xdata(end)); plot(xdata,ydata,'ko',times,fun(x,times),'b-') legend('Data','Fitted exponential') title('Data and Fitted Curve')

Encuentre el mejor ajuste exponencial a los datos en el que los parámetros de ajuste estén restringidos.
Genere datos a partir de un modelo de decaimiento exponencial con ruido. El modelo es
con en un rango de 0 a 3 y ruido distribuido normalmente con una media de 0 y una desviación estándar de 0,05.
rng default % for reproducibility xdata = linspace(0,3); ydata = exp(-1.3*xdata) + 0.05*randn(size(xdata));
El problema es: dados los datos (xdata, ydata), encuentre la tasa de decaimiento exponencial que mejor se ajusta a los datos, con los parámetros acotados como sigue:
lb = [0,-2]; ub = [3/4,-1];
Cree el modelo.
fun = @(x,xdata)x(1)*exp(x(2)*xdata);
Cree una conjetura inicial.
x0 = [1/2,-2];
Resuelva el problema de ajuste acotado.
x = lsqcurvefit(fun,x0,xdata,ydata,lb,ub)
Local minimum found. Optimization completed because the size of the gradient is less than the value of the optimality tolerance.
x = 1×2
0.7500 -1.0000
Compruebe lo bien que se ajusta la curva resultante a los datos. Dado que los límites mantienen la solución lejos de los valores reales, el ajuste es mediocre.
plot(xdata,ydata,'ko',xdata,fun(x,xdata),'b-') legend('Data','Fitted exponential') title('Data and Fitted Curve')

Cree datos artificiales para un modelo no lineal con parámetros , , y , para el tiempo de 2 a 7. Añada ruido a los datos utilizando randn.
a = 2; % x(1) b = 4; % x(2) t0 = 5; % x(3) c = 1/2; % x(4) xdata = linspace(2,7); rng default ydata = a + b*atan(xdata - t0) + c*xdata + 1/10*randn(size(xdata));
Represente los datos.
plot(xdata,ydata,'ro')
Ajuste un modelo no lineal a los datos con las restricciones siguientes:
Todos los coeficientes deben estar entre 0 y 7.
. Puede escribir esta restricción con el formato
A*x <= bempleandoA = [-1 -1 1 1]yb = 0.
lb = zeros(4,1); ub = 7*ones(4,1); A = [-1 -1 1 1]; b = 0;
La función myfun al final de este ejemplo crea la función objetivo para este modelo.
Resuelva el problema de ajuste comenzando por el punto [1 2 3 1].
startpt = [1 2 3 1]; Aeq = []; beq = []; [x,res] = lsqcurvefit(@myfun,startpt,xdata,ydata,lb,ub,A,b,Aeq,beq)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance.
x = 1×4
2.3447 4.0972 4.9979 0.4303
res = 1.2682
La solución devuelta no está lejos del punto original [2 4 5 1/2]. Represente los datos en la curva desde el punto de solución.
plot(xdata,ydata,'ro',xdata,myfun(x,xdata),'b-')

La solución obtenida se ajusta bastante bien a los datos. ¿La restricción está activa?
A*x(:)
ans = -1.0137
La restricción no está activa porque A*x < 0.
function F = myfun(x,xdata) a = x(1); b = x(2); t0 = x(3); c = x(4); F = a + b*atan(xdata - t0) + c*xdata; end
Cree datos artificiales para un modelo no lineal con parámetros , , y , para el tiempo de 2 a 7. Añada ruido a los datos utilizando randn.
a = 2; % x(1) b = 4; % x(2) t0 = 5; % x(3) c = 1/2; % x(4) xdata = linspace(2,7); rng default ydata = a + b*atan(xdata - t0) + c*xdata + 1/10*randn(size(xdata));
Represente los datos.
plot(xdata,ydata,'ro')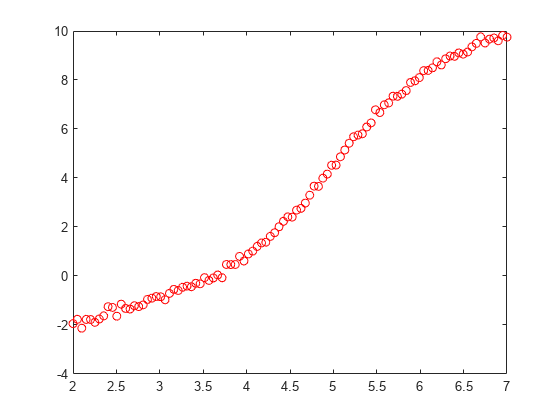
Ajuste un modelo no lineal a los datos con las restricciones siguientes:
Todos los coeficientes deben estar entre 0 y 7.
lb = zeros(4,1); ub = 7*ones(4,1);
El problema no tiene restricciones lineales.
A = []; b = []; Aeq = []; beq = [];
La función myfun al final de este ejemplo crea la función objetivo para este modelo. La función nlcon al final de este ejemplo crea la función de restricción no lineal.
Resuelva el problema de ajuste comenzando por el punto [1 2 3 1].
startpt = [1 2 3 1]; [x,res] = lsqcurvefit(@myfun,startpt,xdata,ydata,lb,ub,A,b,Aeq,beq,@nlcon)
Feasible point with lower objective function value found. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance.
x = 1×4
1.3806 3.7542 5.0169 0.6337
res = 1.6018
La solución devuelta x no se encuentra en el punto original [2 4 5 1/2] debido a que la restricción no lineal se vulnera en ese punto. Represente los datos en la curva desde el punto de solución y calcule la función de restricción.
plot(xdata,ydata,'ro',xdata,myfun(x,xdata),'b-')

[c,ceq] = nlcon(x)
c = -3.1307e-06
ceq =
[]
La restricción de desigualdad no lineal se encuentra activa en la solución porque c = 0 en la solución.
Aunque el punto de solución no se encuentra en el punto original, la curva de solución se ajusta bastante bien a los datos.
function F = myfun(x,xdata) a = x(1); b = x(2); t0 = x(3); c = x(4); F = a + b*atan(xdata - t0) + c*xdata; end function [c,ceq] = nlcon(x) ceq = []; c = x(1)^2 + x(2)^2 - 4^2; end
Compare los resultados de ajuste con el algoritmo 'trust-region-reflective' predeterminado y con el algoritmo 'levenberg-marquardt'.
Suponga que tiene datos de tiempo de observación xdata y datos de respuesta observada ydata, y desea encontrar parámetros y para ajustar un modelo con el formato
Introduzca los tiempos de observación y las respuestas.
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
Cree un modelo de decaimiento exponencial simple.
fun = @(x,xdata)x(1)*exp(x(2)*xdata);
Ajuste el modelo utilizando el punto de inicio x0 = [100,-1].
x0 = [100,-1]; x = lsqcurvefit(fun,x0,xdata,ydata)
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
x = 1×2
498.8309 -0.1013
Compare la solución con la de un ajuste 'levenberg-marquardt'.
options = optimoptions('lsqcurvefit','Algorithm','levenberg-marquardt'); lb = []; ub = []; x = lsqcurvefit(fun,x0,xdata,ydata,lb,ub,options)
Local minimum possible. lsqcurvefit stopped because the relative size of the current step is less than the value of the step size tolerance.
x = 1×2
498.8309 -0.1013
Los dos algoritmos han convergido en la misma solución. Represente los datos y el modelo exponencial ajustado.
times = linspace(xdata(1),xdata(end)); plot(xdata,ydata,'ko',times,fun(x,times),'b-') legend('Data','Fitted exponential') title('Data and Fitted Curve')

Compare los resultados de ajuste con el algoritmo 'trust-region-reflective' predeterminado y con el algoritmo 'levenberg-marquardt'. Examine el proceso de resolución para ver cuál es más eficiente en este caso.
Suponga que tiene datos de tiempo de observación xdata y datos de respuesta observada ydata, y desea encontrar parámetros y para ajustar un modelo con el formato
Introduzca los tiempos de observación y las respuestas.
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
Cree un modelo de decaimiento exponencial simple.
fun = @(x,xdata)x(1)*exp(x(2)*xdata);
Ajuste el modelo utilizando el punto de inicio x0 = [100,-1].
x0 = [100,-1]; [x,resnorm,residual,exitflag,output] = lsqcurvefit(fun,x0,xdata,ydata);
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
Compare la solución con la de un ajuste 'levenberg-marquardt'.
options = optimoptions('lsqcurvefit','Algorithm','levenberg-marquardt'); lb = []; ub = []; [x2,resnorm2,residual2,exitflag2,output2] = lsqcurvefit(fun,x0,xdata,ydata,lb,ub,options);
Local minimum possible. lsqcurvefit stopped because the relative size of the current step is less than the value of the step size tolerance.
¿Son las soluciones equivalentes?
norm(x-x2)
ans = 2.0626e-06
Sí, las soluciones son equivalentes.
¿Qué algoritmo necesitó menos evaluaciones de función para llegar a la solución?
fprintf(['The ''trust-region-reflective'' algorithm took %d function evaluations,\n',... 'and the ''levenberg-marquardt'' algorithm took %d function evaluations.\n'],... output.funcCount,output2.funcCount)
The 'trust-region-reflective' algorithm took 87 function evaluations, and the 'levenberg-marquardt' algorithm took 72 function evaluations.
Represente los datos y el modelo exponencial ajustado.
times = linspace(xdata(1),xdata(end)); plot(xdata,ydata,'ko',times,fun(x,times),'b-') legend('Data','Fitted exponential') title('Data and Fitted Curve')

El ajuste tiene buen aspecto. ¿Cuán grandes son los valores residuales?
fprintf(['The ''trust-region-reflective'' algorithm has residual norm %f,\n',... 'and the ''levenberg-marquardt'' algorithm has residual norm %f.\n'],... resnorm,resnorm2)
The 'trust-region-reflective' algorithm has residual norm 9.504887, and the 'levenberg-marquardt' algorithm has residual norm 9.504887.
Argumentos de entrada
Argumentos de salida
Limitaciones
El algoritmo trust-region-reflective no resuelve sistemas subdeterminados; requiere que el número de ecuaciones, es decir, la dimensión de fila de F, sea al menos igual que el número de variables. En el caso subdeterminado,
lsqcurvefitutiliza el algoritmo Levenberg-Marquardt.lsqcurvefitpuede resolver problemas de valores complejos de forma directa. Tenga en cuenta que las restricciones no tienen sentido para valores complejos, ya que los números complejos no están bien ordenados; preguntar si un valor complejo es mayor o menor que otro valor complejo carece de sentido. Para un problema complejo con límites de restricción, divida las variables en partes reales e imaginarias. No utilice el algoritmo'interior-point'para datos complejos. Consulte Ajustar un modelo a datos de valores complejos.El cálculo de precondicionador utilizado en la parte del gradiente conjugado precondicionado del método trust-region-reflective forma JTJ (donde J es la matriz jacobiana) antes de calcular el precondicionador. Por lo tanto, una fila de J con muchos elementos distintos de cero, que resulta en un producto JTJ casi denso, puede traducirse en un proceso de resolución costoso para problemas grandes.
Si los componentes de x no tienen límites superiores (o inferiores),
lsqcurvefitprefiere que los correspondientes componentes deub(olb) se establezcan eninf(o-infpara límites inferiores) en lugar de un número positivo arbitrario, pero muy grande (o negativo para límites inferiores).
Puede utilizar el algoritmo trust-region reflective en lsqnonlin, lsqcurvefit y fsolve con problemas a pequeña o mediana escala sin calcular la matriz jacobiana en fun o sin proporcionar el patrón de dispersión de la matriz jacobiana. (Esto también se aplica al uso de fmincon o fminunc sin calcular la matriz Hessiana o sin proporcionar el patrón de dispersión de la matriz hessiana). ¿Cómo de pequeña es la escala pequeña o mediana? No existe ninguna respuesta absoluta, ya que depende de la cantidad de memoria virtual en la configuración que haya disponible en sistema del ordenador.
Suponga que su problema tiene m ecuaciones y n incógnitas. Si el comando J = sparse(ones(m,n)) provoca un error Out of memory en su equipo, se trata claramente de un problema demasiado grande. Si no provoca un error, es posible que el problema aún sea demasiado grande. Solo puede saberlo ejecutándolo y comprobando si MATLAB se ejecuta dentro de la cantidad de memoria virtual disponible en el sistema.
Algoritmos
Los métodos Levenberg-Marquardt y trust-region-reflective se basan en los algoritmos de mínimos cuadrados no lineales que también se utilizan en fsolve.
Este algoritmo trust-region-reflective predeterminado es un método de región de confianza de subespacio y se basa en el método de Newton de reflejo de punto interior descrito en [1] y [2]. Cada iteración implica la solución aproximada de un sistema lineal amplio utilizando el método de gradientes conjugados precondicionados (PCG). Consulte Mínimos cuadrados trust-region-reflective.
El método de Levenberg-Marquardt se describe en las referencias [4], [5] y [6]. Consulte Método de Levenberg-Marquardt.
El algoritmo 'interior-point' utiliza el algoritmo 'interior-point' de fmincon con algunas modificaciones. Para obtener más detalles, consulte Algoritmo fmincon modificado para mínimos cuadrados restringidos.
Funcionalidad alternativa
App
La tarea Optimize de Live Editor proporciona una interfaz visual para lsqcurvefit.
Referencias
[1] Coleman, T.F. and Y. Li. “An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds.” SIAM Journal on Optimization, Vol. 6, 1996, pp. 418–445.
[2] Coleman, T.F. and Y. Li. “On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds.” Mathematical Programming, Vol. 67, Number 2, 1994, pp. 189–224.
[3] Dennis, J. E. Jr. “Nonlinear Least-Squares.” State of the Art in Numerical Analysis, ed. D. Jacobs, Academic Press, pp. 269–312.
[4] Levenberg, K. “A Method for the Solution of Certain Problems in Least-Squares.” Quarterly Applied Mathematics 2, 1944, pp. 164–168.
[5] Marquardt, D. “An Algorithm for Least-squares Estimation of Nonlinear Parameters.” SIAM Journal Applied Mathematics, Vol. 11, 1963, pp. 431–441.
[6] Moré, J. J. “The Levenberg-Marquardt Algorithm: Implementation and Theory.” Numerical Analysis, ed. G. A. Watson, Lecture Notes in Mathematics 630, Springer Verlag, 1977, pp. 105–116.
[7] Moré, J. J., B. S. Garbow, and K. E. Hillstrom. User Guide for MINPACK 1. Argonne National Laboratory, Rept. ANL–80–74, 1980.
[8] Powell, M. J. D. “A Fortran Subroutine for Solving Systems of Nonlinear Algebraic Equations.” Numerical Methods for Nonlinear Algebraic Equations, P. Rabinowitz, ed., Ch.7, 1970.