addCollision
Añadir una geometría de colisión a un cuerpo rígido
Descripción
addCollision( añade una geometría de colisión del tipo geométrico especificado y con los parámetros dados en el cuerpo rígido especificado.body,type,parameters)
addCollision( añade un objeto de geometría de colisión al cuerpo rígido, especificado como uno de estos objetos de colisión: body,collisionObj)
Esta sintaxis coloca la geometría de colisión en una pose relativa de tform*collisionObj.Pose con respecto al marco del cuerpo rígido.
addCollision(___, especifica una transformación para la geometría de colisión con relación al marco del cuerpo junto con cualquier combinación de argumentos de entrada de sintaxis anteriores.tform)
Ejemplos
Cargue un modelo de robot y modifique las mallas de colisión. Borre las mallas de colisión existentes, añada primitivas de objeto de colisión simples y compruebe si determinadas configuraciones se encuentran en colisión.
Cargar un modelo de robot
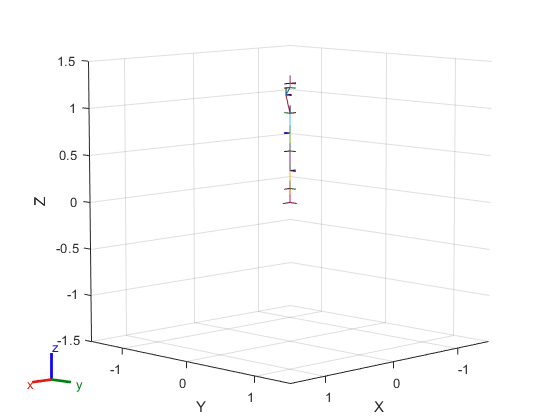
Cargue un modelo de robot preconfigurado en el área de trabajo mediante la función loadrobot. Este modelo ya tiene mallas de colisión especificadas para cada cuerpo. Itere a través de todos los elementos del cuerpo rígido y borre las mallas de colisión existentes. Confirme que las mallas existentes hayan desaparecido.
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");
Añadir colisiones en forma de cilindros
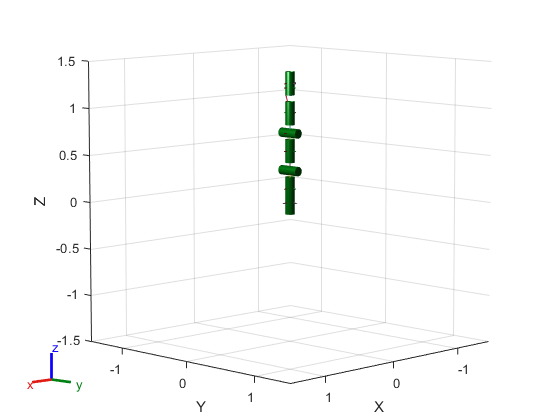
Añada iterativamente una colisión en forma de cilindro a cada cuerpo. Omita algunos cuerpos para este modelo concreto, pues se solapan y siempre colisionan con el efector final (cuerpo 10).
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i},collisionObj) end end show(robot,Collisions="on",Visuals="off");
Comprobar si existen colisiones
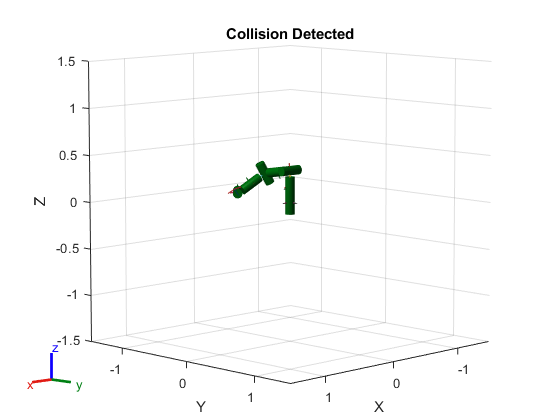
Genere una serie de configuraciones aleatorias. Compruebe si el robot está en colisión en cada una de las configuraciones. Visualice las configuraciones que presenten una colisión.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end
Argumentos de entrada
Capacidades ampliadas
Historial de versiones
Introducido en R2020bConsulte también
addVisual | checkCollision | clearCollision | clearVisual | show | rigidBodyTree