show
Mostrar modelo de robot en la figura
Descripción
show( usa las posiciones de las articulaciones especificadas en robot,configuration)configuration para mostrar los marcos del cuerpo del robot.
show(___, especifica las opciones mediante uno o más argumentos de par nombre-valor, además de cualquier combinación de argumentos de entrada de las sintaxis anteriores. Por ejemplo, Name=Value)Frames="off" oculta los marcos del cuerpo rígido en la figura.
ax = show(___)
Ejemplos
Cargue un robot y obtenga su configuración inicial.
robot = loadrobot("abbIrb120",DataFormat="row"); c = homeConfiguration(robot);
Cree una trayectoria de waypoint de configuración que haga girar la base del árbol de cuerpo rígido 360 grados.
numSamples = 100; cWpts = zeros(numSamples,size(c,2)); cWpts(:,1) = linspace(0,2*pi,numSamples);
Muestre la gráfica del robot en la primera configuración. La opción DisplayBodyDetails debe estar desactivada para permitir la animación.
ax = show(robot,cWpts(1,:),FastUpdate=true,PreservePlot=false,DisplayBodyDetails="off"); title("Rigid Body Tree Animation") axis([-0.75 0.75 -0.75 0.75 0 1]) hold on
Represente todas las configuraciones y asegúrese de utilizar la función drawnow para crear una barra de control del tiempo de animación debajo de la figura para reproducir la animación.
rc = rateControl(60); % 60 Hz for i = 1:numSamples show(robot,cWpts(i,:),Parent=ax,FastUpdate=true,PreservePlot=false,DisplayBodyDetails="off"); drawnow waitfor(rc); end hold off

Puede importar robots que tienen archivos .stl relacionados con el archivo de formato de descripción de robot unificado (URDF) para describir las geometrías visuales del robot. Cada cuerpo rígido tiene especificada una geometría visual individual. La función importrobot analiza el archivo URDF para obtener el modelo de robot y las geometrías visuales. La función asume que la geometría visual y la geometría de colisión del robot son iguales y asigna las geometrías visuales como geometrías de colisión de los cuerpos correspondientes.
Utilice la función show para mostrar la geometría visual y de colisión del modelo de robot en una figura. Luego, puede interactuar con el modelo haciendo clic en componentes para inspeccionarlos y haciendo clic con el botón secundario para alternar la visibilidad.
Importe un modelo de robot como un archivo URDF. Las ubicaciones de los archivos .stl se deben especificar correctamente en este URDF. Para añadir otros archivos .stl a cuerpos rígidos individuales, consulte addVisual.
robot = importrobot('iiwa14.urdf');Visualice el robot con el modelo visual correspondiente. Haga clic en los cuerpos o los marcos para inspeccionarlos. Haga clic con el botón secundario en los cuerpos para alternar la visibilidad de cada geometría visual.
show(robot,Visuals="on",Collisions="off");

Visualice el robot con las geometrías de colisión correspondientes. Haga clic en los cuerpos o los marcos para inspeccionarlos. Haga clic con el botón secundario en los cuerpos para alternar la visibilidad de cada geometría de colisión.
show(robot,Visuals="off",Collisions="on");

Muestre diferentes configuraciones de robot creadas mediante un modelo rigidBodyTree. Utilice las funciones homeConfiguration o randomConfiguration para generar la estructura que define todas las posiciones de articulación.
Cargue un FANUC LR Mate 200ib de Robotics System Toolbox™ loadrobot. Devuelto como un objeto rigidBodyTree.
robot = loadrobot("fanucLRMate200ib");
showdetails(robot)-------------------- Robot: (9 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 base base_link-base fixed base_link(0) 2 link_1 joint_1 revolute base_link(0) link_2(3) 3 link_2 joint_2 revolute link_1(2) link_3(4) 4 link_3 joint_3 revolute link_2(3) link_4(5) 5 link_4 joint_4 revolute link_3(4) link_5(6) 6 link_5 joint_5 revolute link_4(5) link_6(7) 7 link_6 joint_6 revolute link_5(6) flange(8) tool0(9) 8 flange joint_6-flange fixed link_6(7) 9 tool0 link_6-tool0 fixed link_6(7) --------------------
Cree una estructura para la configuración inicial del robot. La estructura incluye nombres y posiciones de articulación para todos los cuerpos del modelo de robot.
config = homeConfiguration(robot)
config=1×6 struct array with fields:
JointName
JointPosition
Muestre la configuración inicial utilizando show. No es necesario especificar una entrada de configuración.
show(robot);

Modifique la configuración y establezca la segunda posición de articulación en pi/2. Muestre el cambio resultante en la configuración del robot.
config(2).JointPosition = pi/2; show(robot,config);

Cree configuraciones aleatorias y muéstrelas.
show(robot,randomConfiguration(robot));

Utilice los parámetros Denavit-Hartenberg (DH) del robot Puma560® para construir un robot. Los cuerpos rígidos se añaden de uno en uno con la transformación de elemento primario en secundario especificada por el objeto de articulación.
Los parámetros DH definen la geometría del robot en términos de cómo se acopla cada cuerpo rígido a su elemento principal. Para mayor facilidad, configure los parámetros del robot Puma560 en una matriz [1]. El robot Puma es un manipulador de cadena en serie. Los parámetros DH son relativos a la fila anterior de la matriz, correspondiente a la articulación anterior.
dhparams = [0 pi/2 0 0;
0.4318 0 0 0
0.0203 -pi/2 0.15005 0;
0 pi/2 0.4318 0;
0 -pi/2 0 0;
0 0 0 0];Cree un objeto de árbol de cuerpo rígido para construir el robot.
robot = rigidBodyTree;
Cree el primer cuerpo rígido y añádalo al robot. Para añadir un cuerpo rígido:
Cree un objeto
rigidBodyy asígnele un nombre único.Cree un objeto
rigidBodyJointy asígnele un nombre único.Utilice
setFixedTransformpara especificar la transformación de cuerpo a cuerpo con parámetros DH. El último elemento de los parámetros DH,theta, se ignora porque el ángulo depende de la posición de articulación.Llame a
addBodypara acoplar la primera articulación del cuerpo al marco base del robot.
body1 = rigidBody('body1'); jnt1 = rigidBodyJoint('jnt1','revolute'); setFixedTransform(jnt1,dhparams(1,:),'dh'); body1.Joint = jnt1; addBody(robot,body1,'base')
Cree y añada otros cuerpos rígidos al robot. Especifique el nombre del cuerpo anterior llamando a addBody para acoplarlo. Cada transformación fija es relativa al marco de coordenadas de la articulación anterior.
body2 = rigidBody('body2'); jnt2 = rigidBodyJoint('jnt2','revolute'); body3 = rigidBody('body3'); jnt3 = rigidBodyJoint('jnt3','revolute'); body4 = rigidBody('body4'); jnt4 = rigidBodyJoint('jnt4','revolute'); body5 = rigidBody('body5'); jnt5 = rigidBodyJoint('jnt5','revolute'); body6 = rigidBody('body6'); jnt6 = rigidBodyJoint('jnt6','revolute'); setFixedTransform(jnt2,dhparams(2,:),'dh'); setFixedTransform(jnt3,dhparams(3,:),'dh'); setFixedTransform(jnt4,dhparams(4,:),'dh'); setFixedTransform(jnt5,dhparams(5,:),'dh'); setFixedTransform(jnt6,dhparams(6,:),'dh'); body2.Joint = jnt2; body3.Joint = jnt3; body4.Joint = jnt4; body5.Joint = jnt5; body6.Joint = jnt6; addBody(robot,body2,'body1') addBody(robot,body3,'body2') addBody(robot,body4,'body3') addBody(robot,body5,'body4') addBody(robot,body6,'body5')
Verifique que el robot se ha construido correctamente con la función showdetails o show. showdetails enumera todos los cuerpos en la ventana de comandos de MATLAB®. show muestra el robot con una determinada configuración (de forma predeterminada, la inicial). Las llamadas a axis modifican los límites de eje y ocultan las etiquetas de eje.
showdetails(robot)
-------------------- Robot: (6 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1 revolute base(0) body2(2) 2 body2 jnt2 revolute body1(1) body3(3) 3 body3 jnt3 revolute body2(2) body4(4) 4 body4 jnt4 revolute body3(3) body5(5) 5 body5 jnt5 revolute body4(4) body6(6) 6 body6 jnt6 revolute body5(5) --------------------
show(robot);
axis([-0.5,0.5,-0.5,0.5,-0.5,0.5])
axis off
[1] Corke, P. I. y B. Armstrong-Helouvry. “A Search for Consensus among Model Parameters Reported for the PUMA 560 Robot”. Proceedings of the 1994 IEEE International Conference on Robotics and Automation, IEEE Computer. Soc. Press, 1994, págs. 1608–13. DOI.org (Crossref), doi:10.1109/ROBOT.1994.351360.
Cargue un modelo de robot y modifique las mallas de colisión. Borre las mallas de colisión existentes, añada primitivas de objeto de colisión simples y compruebe si determinadas configuraciones se encuentran en colisión.
Cargar un modelo de robot
Cargue un modelo de robot preconfigurado en el área de trabajo mediante la función loadrobot. Este modelo ya tiene mallas de colisión especificadas para cada cuerpo. Itere a través de todos los elementos del cuerpo rígido y borre las mallas de colisión existentes. Confirme que las mallas existentes hayan desaparecido.
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");

Añadir colisiones en forma de cilindros
Añada iterativamente una colisión en forma de cilindro azul a cada cuerpo y establezca la transparencia en opaca. Omita algunos cuerpos para este modelo concreto, pues se solapan y siempre colisionan con el efector final (cuerpo 10).
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i}, collisionObj, FaceColor=[0 0 1], FaceAlpha=1) end end show(robot,Collisions="on",Visuals="off");

Comprobar si existen colisiones
Genere una serie de configuraciones aleatorias. Compruebe si el robot está en colisión en cada una de las configuraciones. Visualice las configuraciones que presenten una colisión.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end

Argumentos de entrada
Argumentos de par nombre-valor
Especifique pares de argumentos opcionales como Name1=Value1,...,NameN=ValueN, donde Name es el nombre del argumento y Value es el valor correspondiente. Los argumentos nombre-valor deben aparecer después de los otros argumentos, pero el orden de los pares no importa.
Ejemplo: Frames="off" oculta los marcos del cuerpo rígido en la figura.
Elemento principal de los ejes, especificado como un objeto Axes en el que se representa el robot. De forma predeterminada, el robot se representa en los ejes activos.
Opción para conservar la gráfica de robot, especificada como 1 (true) o 0 (false) lógicos. Cuando especifica PreservePlot como true, también debe usar hold on de forma que show no sobrescriba parches de árbol de cuerpo rígido anteriores en los ejes mostrados al llamar a show. Cuando especifica PreservePlot como false, show sobrescribe gráficas anteriores del árbol de cuerpo rígido en los mismos ejes, independientemente del valor hold actual.
Nota
Si PreservePlot es true, el argumento FastUpdate debe ser false.
Tipos de datos: logical
Mostrar marcos del cuerpo, especificado como "all", "root" u "off".
"all": mostrar los marcos de coordenadas raíz y no raíz de los cuerpos rígidos en el árbol de cuerpo rígido.Nota
Si el argumento nombre-valor
FastUpdateestruey el argumento nombre-valorPreservePlotesfalse, la funciónshowno representa los marcos no raíz."root": mostrar solo los marcos raíz del árbol de cuerpo rígido. El marco raíz de un cuerpo rígido es el marco de coordenadas ubicado en el origen de ese cuerpo."off": no mostrar ningún marco.
Tipos de datos: char | string
Tamaño de los marcos del cuerpo, especificado como escalar numérico positivo.
Mostrar geometrías visuales, especificado como "on" u "off". Las geometrías visuales individuales también se pueden desactivar haciendo clic con el botón secundario en la figura.
Especifique las geometrías visuales individuales usando addVisual. Para importar un modelo de robot URDF con archivos .stl para mallas, consulte la función importrobot.
Tipos de datos: char | string
Visualización de geometrías de colisión, especificada como un par separado por comas compuesto por "Collisions" y "on" u "off".
Añada geometrías de colisión a los cuerpos rígidos individuales del modelo de robot usando la función addCollision. Para importar un modelo de robot URDF con archivos .stl para mallas, consulte la función importrobot.
Tipos de datos: char | string
Posición del robot, especificada como un par separado por comas compuesto por "Position" y un vector de cuatro elementos con el formato [x y z yaw]. Los elementos x, y y z especifican la posición en metros, y yaw especifica el ángulo de guiñada en radianes.
Tipos de datos: single | double
Actualizaciones rápidas de graficas existentes, especificadas como 0 (false) o 1 (true) lógicos. Debe usar la función de objeto show para mostrar inicialmente el modelo de robot antes de poder especificarlo con este argumento.
Nota
Si FastUpdate es true, el argumento PreservePlot debe ser false.
Tipos de datos: logical
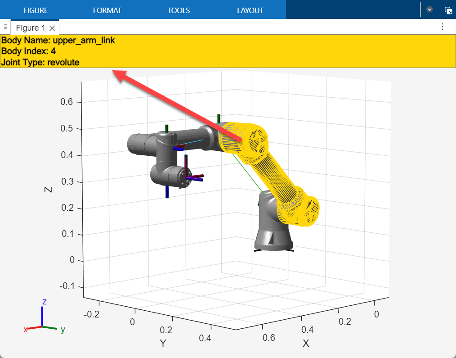
Mostrar detalles del cuerpo rígido al hacer clic, especificado como "on" u "off".
Para inspeccionar interactivamente los cuerpos del árbol de cuerpo rígido representado, establezca DisplayBodyDetails en "on". Esto permite hacer clic en un cuerpo rígido para mostrar información sobre él en un banner amarillo de detalles del cuerpo en la parte superior de la figura. El banner de detalles del cuerpo contiene el nombre del cuerpo, el índice del cuerpo y el tipo de articulación del cuerpo seleccionado. Consulte la sección Sugerencias para obtener más información.
Para activar las animaciones de árbol de cuerpo rígido en los scripts de código en vivo, debe establecer DisplayBodyDetails en "off". Consulte el ejemplo Crear animación de árbol de cuerpo rígido para obtener más información.
Argumentos de salida
Sugerencias
Un modelo de robot tiene componentes visuales asociados. Cada objeto rigidBody contiene un marco de coordenadas que se muestra como el marco del cuerpo. Cada cuerpo también puede tener mallas visuales asociadas. De forma predeterminada, ambos componentes se muestran automáticamente. Cuando el argumento nombre-valor DisplayBodyDetails es "on", puede inspeccionar o modificar los componentes visuales de la visualización del árbol de cuerpo rígido. Haga clic en los marcos del cuerpo o las mallas visuales para resaltarlos en amarillo y ver el nombre del cuerpo asociado, el índice y el tipo de articulación en el banner amarillo con los detalles del cuerpo. Haga clic con el botón secundario para alternar la visualización de los componentes individuales.
Marcos del cuerpo: los marcos del cuerpo individuales se muestran como un marco de coordenadas de 3 ejes. Los marcos fijos se representan en color rosa. Los tipos de articulaciones móviles se muestran como ejes RGB. Puede hacer clic en un marco del cuerpo para ver el eje de movimiento. Las articulaciones prismáticas muestran una flecha amarilla en la dirección del eje de movimiento y las articulaciones rotacionales muestran una flecha circular alrededor del eje de rotación.

Mallas visuales: Las geometrías visuales individuales se especifican usando el método
addVisualo la funciónimportrobotpara importar un modelo de robot con un archivo.stlo.daeespecificado. Al hacer clic con el botón secundario en cuerpos individuales de una figura, puede desactivar sus mallas o especificar el par nombre-valorVisualspara ocultar todas las geometrías visuales.