closestPoint
Encuentre el punto más cercano en la ruta de referencia al punto global
Sintaxis
Descripción
pathPoints = closestPoint(refPath,points)points.
[ devuelve opcionalmente un vector lógico pathPoints,inWindow] = closestPoint(refPath,points)inWindow, que especifica si cada punto de la coordenada xy correspondiente en points se proyecta dentro de la ventana de búsqueda.
[_] = closestPoint( acepta opcionalmente un vector fila no decreciente refPath,points,searchWindow)searchWindow, que define el intervalo de la ruta a utilizar para encontrar los puntos más cercanos.
Ejemplos
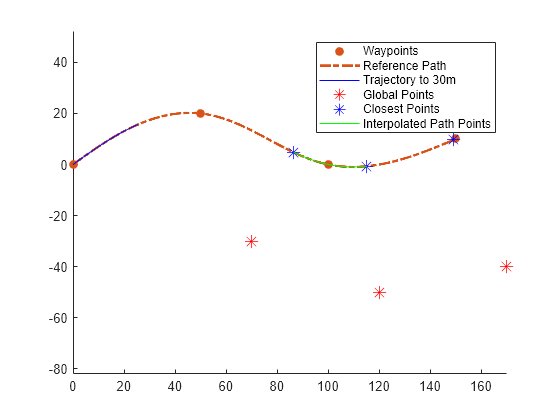
Genere una ruta de referencia a partir de un conjunto de puntos de referencia.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
connector = trajectoryGeneratorFrenet(refPath);
Genera una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 metros de la ruta como afirma Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convierta la trayectoria a los estados globales.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Muestra la ruta de referencia y la trayectoria.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Especifique puntos globales y busque los puntos más cercanos en la ruta de referencia.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Muestra los puntos globales y los puntos más cercanos en la ruta de referencia.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpola entre las longitudes de arco de los dos primeros puntos más cercanos a lo largo de la ruta de referencia.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Muestra los waypoints interpolados.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
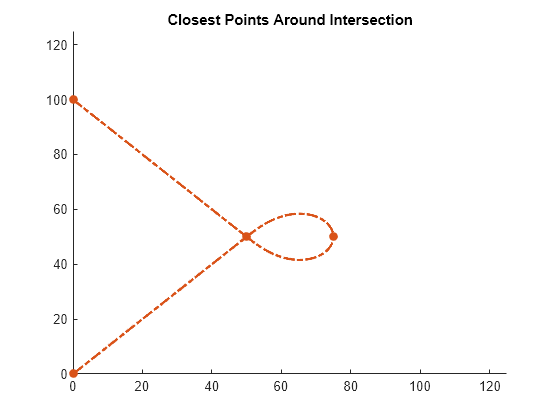
Cree una ruta de referencia que se interseque sola.
refPath = referencePathFrenet([0 100 -pi/4; ... 50 50 -pi/4;... 75 50 pi/2; ... 50 50 -3*pi/4; ... 0 0 -3*pi/4]);
Mostrar la ruta de referencia.
figure show(refPath); title("Closest Points Around Intersection") xlim([0 125]) ylim([0 125]) hold on
Encuentre la longitud del arco en la que ocurre la intersección.
sIntersection = refPath.SegmentParameters(2,end);
Genere los estados de Frenet que se encuentran justo antes y después de la intersección.
f0 = [sIntersection-20 5 0 10 0 0]; % [S dS ddS L Lp Lpp] f1 = [sIntersection+20 5 0 -5 0 0]; % [S dS ddS L Lp Lpp]
Calcule el tiempo para viajar con velocidad longitudinal constante.
T = (f1(1)-f0(1))/f1(2);
Cree un generador de trayectoria utilizando la ruta de referencia.
generator = trajectoryGeneratorFrenet(refPath);
Generar una trayectoria entre los puntos.
[fTraj,gTraj] = connect(generator,f0,f1,T); pts = gTraj.Trajectory;
Defina las funciones auxiliares de la trama.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1);
plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))),mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:});
plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);Trazar la trayectoria.
plotFcn(pts,[],{"k.-"});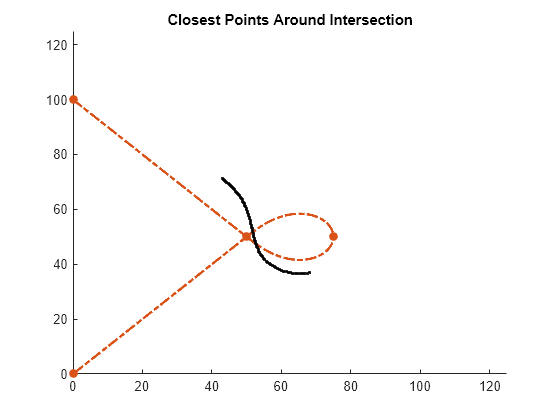
Calcule el punto más cercano en la ruta a cada estado global.
closestPts = closestPoint(refPath,pts);
Trazar los vectores de puntos más cercanos.
plotFcn(pts,closestPts,{"b"});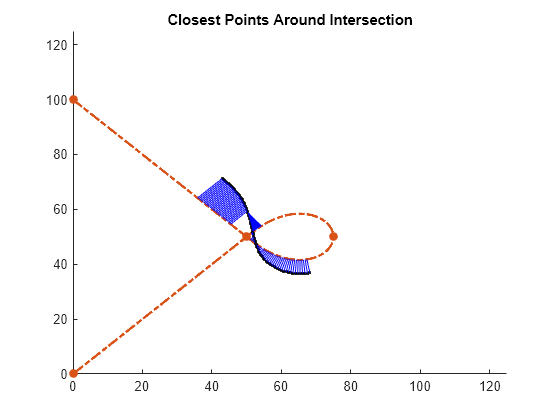
Defina una ventana en la que buscar puntos más cercanos.
buffWindow = [f0(1)-5 f1(1)+5];
plotInterval(buffWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});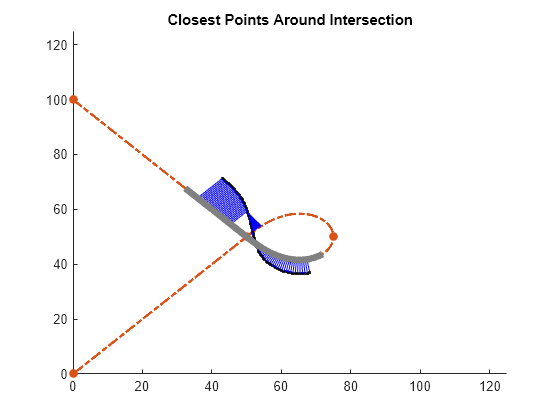
Encuentra los puntos más cercanos dentro de la ventana.
closestPtsInWindow = closestPoint(refPath,pts,buffWindow);
Mostrar resultados en ventanas.
plotFcn(pts,closestPtsInWindow,{"g","LineWidth",3});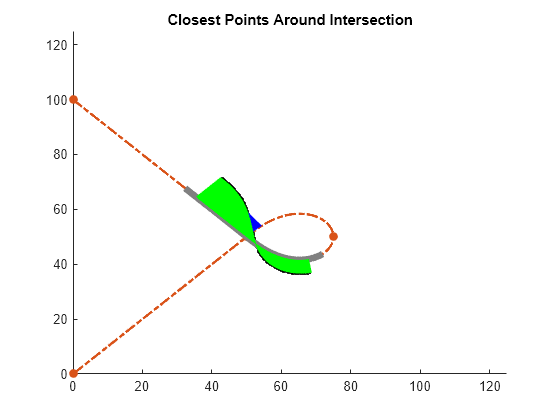
Encuentre los puntos más cercanos usando una ventana que sea demasiado pequeña.
smallWindow = [f0(1)+5 f1(1)-5]; [closestPtsSmall,inWindow] = closestPoint(refPath,pts,smallWindow);
Superponer resultados de ventanas pequeñas.
plotInterval(smallWindow,100,{"m","LineWidth",3});
plotFcn(pts(inWindow,:),closestPtsSmall(inWindow,:),{"Color",[.5 1 .5]});
plotFcn(pts(~inWindow,:),closestPtsSmall(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","Trajectory","ClosestPoints",...
"BuffWindow","ClosestInsideBuffWindow","SmallWindow",...
"ClosestInsideSmallWindow","ClosestOutsideSmallWindow"});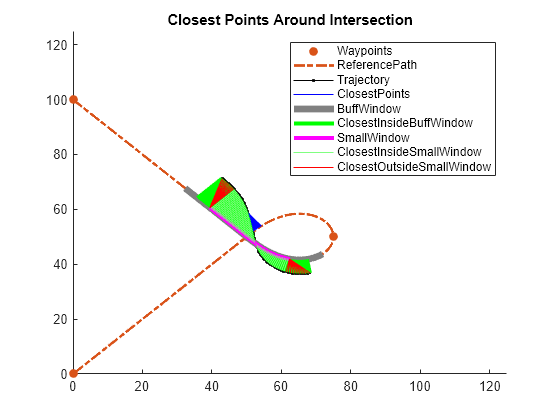
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2020b