global2frenet
Convertir estados globales a estados de Frenet
Sintaxis
Descripción
frenetState = global2frenet(refPath,globalState)
[___, devuelve latTimeDerivatives] = global2frenet(refPath,globalState)latTimeDerivatives que contiene derivadas de primer y segundo orden de la desviación lateral con respecto al tiempo y un indicador que indica si el rumbo debe invertirse al convertir a coordenadas globales.
[___] = global2frenet( acepta un vector de longitudes de arco, refPath,globalState,sFrame)sFrame en el que se debe centrar el marco de Frenet.
Ejemplos
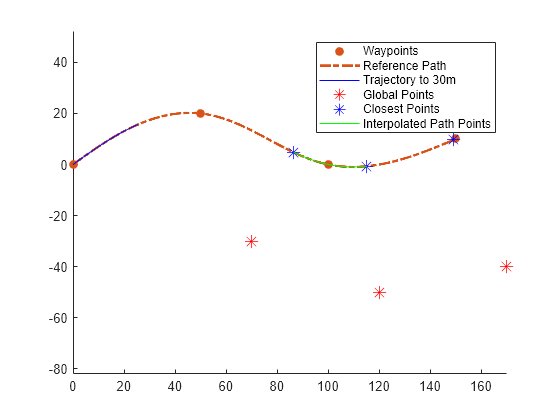
Genere una ruta de referencia a partir de un conjunto de puntos de referencia.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
connector = trajectoryGeneratorFrenet(refPath);
Genera una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 metros de la ruta como afirma Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convierta la trayectoria a los estados globales.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Muestra la ruta de referencia y la trayectoria.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Especifique puntos globales y busque los puntos más cercanos en la ruta de referencia.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Muestra los puntos globales y los puntos más cercanos en la ruta de referencia.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpola entre las longitudes de arco de los dos primeros puntos más cercanos a lo largo de la ruta de referencia.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Muestra los waypoints interpolados.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Argumentos de entrada
Argumentos de salida
Más acerca de
La función de objeto
global2frenetencuentra un punto[x y]pa lo largo de la ruta que esté más cerca de la coordenada xy del estado global[x y theta kappa speed accel]g. Como la ruta de referencia es C1 continua (tangencialmente continua), la distancia será la más corta, donde[x y]g-[x y]pes ortogonal a la tangente de la ruta.donde:
x y y theta –– Estado SE(2) expresado en coordenadas globales, con x y y en metros y theta en radianes.
kappa –– Curvatura, o inversa del radio, en
m-1.speed –– Velocidad en la dirección theta en
m/s.accel –– Aceleración en la dirección theta en
m/s2.
Luego, la función evalúa el estado completo de la ruta
[x y theta kappa dkappa s]p. Esto es equivalente a un marco de referencia móvil ubicado en[x y]pcuyo eje longitudinal apunta a lo largo dethetapy el eje lateral interseca con[x y]g(regla de la mano derecha). El movimiento instantáneo de este marco se describe mediante[kappa dkappa]p.donde:
x y y theta — estado SE(2) expresado en coordenadas globales, con x y y en metros y theta en radianes.
kappa — Curvatura, o inversa del radio, en
m-1.dkappa — Derivada de la curvatura con respecto a la longitud del arco en
m-2.s — Longitud del arco, o distancia a lo largo de la trayectoria desde el origen de la trayectoria, en metros.

Los componentes de velocidad y aceleración del estado global actúan a lo largo de la tangente definida por
thetag, que a su vez evoluciona en función dekappag. Luego, la función asigna la posición global, la velocidad y la aceleración al marco de Frenet local y devuelve el estado de Frenet,[s ds dds L dL ddL]f.donde:
s — Longitud del arco, o distancia a lo largo de la trayectoria desde el origen de la trayectoria, en metros.
L — Desviación perpendicular de la dirección de la trayectoria de referencia, en metros.
ds y dds — Derivadas de s relativas al tiempo.
dL y ddL — Derivadas de L relativas a la longitud del arco, s.

El proceso para la función
frenet2globales el inverso de la funciónglobal2frenet.La función
frenet2globalevalúa la ruta en la longitud de arco del estado de Frenet,sf=sp, y devuelve[x y theta kappa dkappa s]p.Este punto define una vez más un sistema de referencia cuyos ejes y movimiento pueden usarse para proyectar las desviaciones laterales o longitudinales y sus derivadas de primer y segundo orden nuevamente en el marco global.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b