interpolate
Interpolar la ruta de referencia en las longitudes de arco proporcionadas
Descripción
pathPoints = interpolate(refPath,arclengths)
Ejemplos
Genere una ruta de referencia a partir de un conjunto de puntos de referencia.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
connector = trajectoryGeneratorFrenet(refPath);
Genera una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 metros de la ruta como afirma Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convierta la trayectoria a los estados globales.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
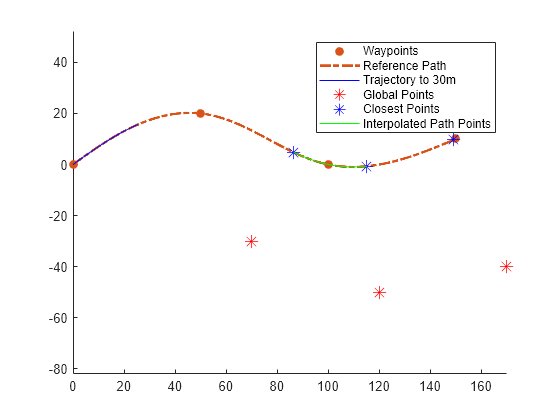
Muestra la ruta de referencia y la trayectoria.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Especifique puntos globales y busque los puntos más cercanos en la ruta de referencia.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Muestra los puntos globales y los puntos más cercanos en la ruta de referencia.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpola entre las longitudes de arco de los dos primeros puntos más cercanos a lo largo de la ruta de referencia.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Muestra los waypoints interpolados.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2020b