Diseño de control de espacio de estados
Los métodos de diseño de control de espacio de estados, como los algoritmos LQG/LQR y de ubicación de polos, son útiles para los diseños MIMO.
Funciones
Temas
- Linear-Quadratic-Gaussian (LQG) Design
Linear-quadratic-Gaussian (LQG) control is a state-space technique that allows you to trade off regulation/tracker performance and control effort, and to take into account process disturbances and measurement noise.
- LQG Regulation: Rolling Mill Case Study
Use linear-quadratic-Gaussian techniques to regulate the beam thickness in a steel rolling mill.
- Design LQG Tracker Using Control System Designer
Design a feedback controller for a disk drive read/write head using LQG synthesis.
- Design Yaw Damper for Jet Transport
This case study illustrates the classical design process.
- Design an LQG Regulator
Design an LQG regulator for a plant output in a system with noise.
- Diseñar un servocontrolador LQG
Diseñe un servocontrolador LQG utilizando un estimador de estado de Kalman.
- Diseñar un servocontrolador LQR en Simulink
Diseñe un controlador LQR para un sistema modelado en Simulink®.
- Ubicación de polos
Las ubicaciones de los polos de lazo cerrado tienen un impacto directo en las características de respuesta en el tiempo, como el tiempo de subida, el tiempo de establecimiento y las oscilaciones transitorias. La ubicación de polos utiliza técnicas de espacio de estados para asignar polos de lazo cerrado.
Ejemplos destacados
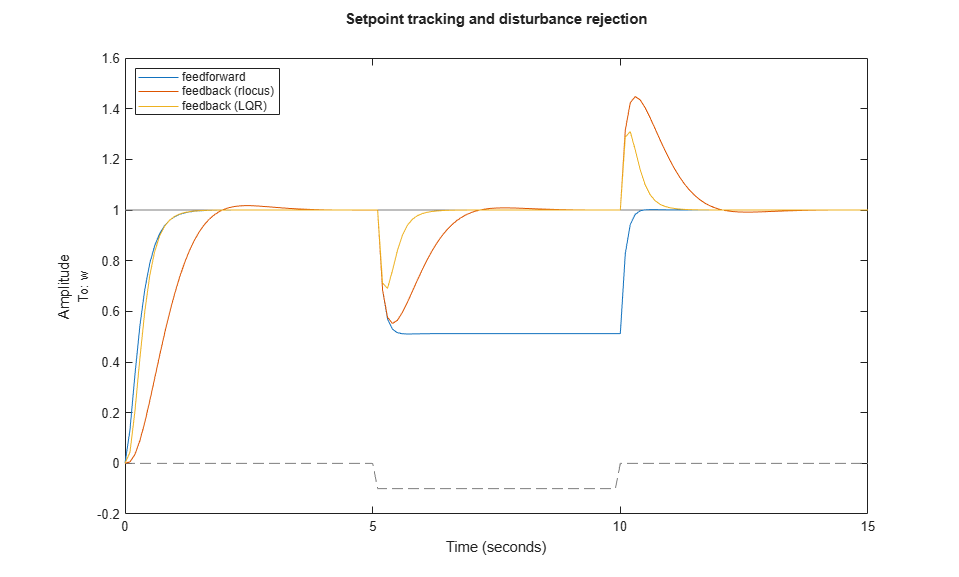
Control de motores de CC
Compare tres técnicas de control de motores de CC para efectuar un seguimiento de comandos de puntos de referencia y reducir la sensibilidad a las perturbaciones de carga.

Thickness Control for a Steel Beam
Design a MIMO LQG regulator to control the horizontal and vertical thickness of a steel beam in a hot steel rolling mill.
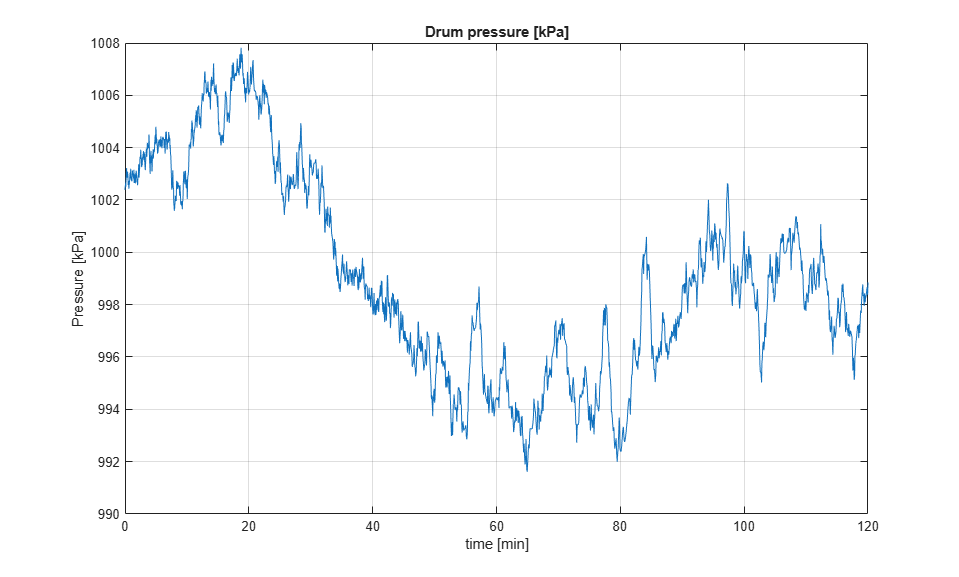
Regulate Pressure in Drum Boiler
Use Simulink® Control Design™ software, using a drum boiler as an example application. Using the operating point search function, the example illustrates model linearization as well as subsequent state observer and LQR design. In this drum-boiler model, the control problem is to regulate boiler pressure in the face of random heat fluctuations from the furnace by adjusting the feed water flow rate and the nominal heat applied. For this example, 95% of the random heat fluctuations are less than 50% of the nominal heating value, which is not unusual for a furnace-fired boiler.