insfilterAsync
Estimar la pose a partir de datos asíncronos de MARG y GPS
Descripción
El objeto insfilterAsync implementa la fusión de sensores de datos MARG y GPS para estimar la postura en el marco de referencia NED (o ENU). Los datos MARG (magnéticos, de velocidad angular y de gravedad) generalmente se derivan de datos de magnetómetro, giroscopio y acelerómetro, respectivamente. El filtro utiliza un vector de estado de 28 elementos para rastrear la orientación quaternion, la velocidad, la posición, los sesgos del sensor MARG y el vector geomagnético. El objeto insfilterAsync utiliza un filtro de Kalman extendido continuo-discreto para estimar estas cantidades.
Creación
Sintaxis
Descripción
filter = insfilterAsyncinsfilterAsync para fusionar datos MARG y GPS asincrónicos con valores de propiedad predeterminados.
filter = insfilterAsync('ReferenceFrame',RF)RF, del filter.
filter = insfilterAsync(___,Name=Value)
Argumentos de entrada
Propiedades
Funciones del objeto
predict | Actualizar estados según el modelo de movimiento para insfilterAsync |
fuseaccel | Estados correctos utilizando datos del acelerómetro para insfilterAsync |
fusegyro | Estados correctos utilizando datos de giroscopio para insfilterAsync |
fusemag | Estados correctos utilizando datos del magnetómetro para insfilterAsync |
fusegps | Estados correctos utilizando datos GPS para insfilterAsync |
correct | Estados correctos utilizando mediciones de estado directas para insfilterAsync |
residual | Residuos y covarianzas residuales de mediciones de estado directas para insfilterAsync |
residualaccel | Residuos y covarianza residual de las mediciones del acelerómetro para insfilterAsync |
residualgps | Residuos y covarianza residual de las mediciones GPS para insfilterAsync |
residualmag | Residuos y covarianza residual de las mediciones del magnetómetro para insfilterAsync |
residualgyro | Residuos y covarianza residual de las mediciones del giroscopio para insfilterAsync |
pose | Estimación de la posición, orientación y velocidad actuales para insfilterAsync |
reset | Restablecer estados internos para insfilterAsync |
stateinfo | Mostrar información del vector de estado para insfilterAsync |
copy | Crear copia de insfilterAsync |
tune | Ajuste los parámetros insfilterAsync para reducir el error de estimación |
tunernoise | Estructura de ruido del filtro de fusión. |
Ejemplos
Cargue los datos del sensor registrados y la pose ground-truth.
load('uavshort.mat','refloc','initstate','imuFs', ... 'accel','gyro','mag','lla','gpsvel', ... 'trueOrient','truePos')
Cree un filtro INS para fusionar datos MARG y GPS asincrónicos para estimar la pose.
filt = insfilterAsync; filt.ReferenceLocation = refloc; filt.State = [initstate(1:4);0;0;0;initstate(5:10);0;0;0;initstate(11:end)];
Definir ruidos de medición del sensor. Los ruidos se determinaron a partir de hojas de datos y experimentación.
Rmag = 80; Rvel = 0.0464; Racc = 800; Rgyro = 1e-4; Rpos = 34;
Preasigne variables para posición y orientación. Asigne una variable para indexar los datos del GPS.
N = size(accel,1);
p = zeros(N,3);
q = zeros(N,1,'quaternion');
gpsIdx = 1;Fusiona datos de acelerómetro, giroscopio, magnetómetro y GPS. El bucle externo predice el avance del filtro en un paso de tiempo y fusiona los datos del acelerómetro y el giroscopio a la frecuencia de muestreo de la IMU.
for ii = 1:N % Predict the filter forward one time step predict(filt,1./imuFs); % Fuse accelerometer and gyroscope readings fuseaccel(filt,accel(ii,:),Racc); fusegyro(filt,gyro(ii,:),Rgyro); % Fuse magnetometer at 1/2 the IMU rate if ~mod(ii, fix(imuFs/2)) fusemag(filt,mag(ii,:),Rmag); end % Fuse GPS once per second if ~mod(ii,imuFs) fusegps(filt,lla(gpsIdx,:),Rpos,gpsvel(gpsIdx,:),Rvel); gpsIdx = gpsIdx + 1; end % Log the current pose estimate [p(ii,:),q(ii)] = pose(filt); end
Calcule los errores RMS entre la posición y orientación verdaderas conocidas y la salida del filtro IMU asíncrono.
posErr = truePos - p;
qErr = rad2deg(dist(trueOrient,q));
pRMS = sqrt(mean(posErr.^2));
qRMS = sqrt(mean(qErr.^2));
fprintf('Position RMS Error\n');Position RMS Error
fprintf('\tX: %.2f, Y: %.2f, Z: %.2f (meters)\n\n',pRMS(1),pRMS(2),pRMS(3));X: 0.55, Y: 0.71, Z: 0.74 (meters)
fprintf('Quaternion Distance RMS Error\n');Quaternion Distance RMS Error
fprintf('\t%.2f (degrees)\n\n', qRMS);4.72 (degrees)
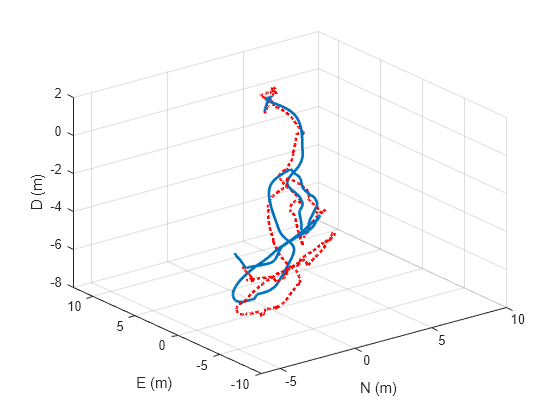
Visualice la posición real y la posición estimada.
plot3(truePos(:,1),truePos(:,2),truePos(:,3),'LineWidth',2) hold on plot3(p(:,1),p(:,2),p(:,3),'r:','LineWidth',2) grid on xlabel('N (m)') ylabel('E (m)') zlabel('D (m)')
Algoritmos
Capacidades ampliadas
Historial de versiones
Introducido en R2019a