insfilterErrorState
Estimar la pose a partir de datos de IMU, GPS y odometría visual monocular (MVO)
Descripción
El objeto insfilterErrorState implementa la fusión de sensores de IMU, GPS y datos de odometría visual monocular (MVO) para estimar la pose en el marco de referencia NED (o ENU). El filtro utiliza un vector de estado de 17 elementos para rastrear la orientación quaternion, la velocidad, la posición, los sesgos del sensor IMU y el factor de escala MVO. El objeto insfilterErrorState utiliza un filtro Kalman de estado de error para estimar estas cantidades.
Creación
Sintaxis
Descripción
filter = insfilterErrorStateinsfilterErrorState con valores de propiedad predeterminados.
filter = insfilterErrorState('ReferenceFrame',RF)RF, del filter.
filter = insfilterErrorState(___,Name=Value)
Argumentos de entrada
Propiedades
Funciones del objeto
predict | Actualizar estados utilizando datos del acelerómetro y giroscopio para insfilterErrorState |
correct | Estados correctos utilizando mediciones de estado directas para insfilterErrorState |
residual | Residuos y covarianzas residuales de mediciones de estado directas para insfilterErrorState |
fusegps | Estados correctos utilizando datos GPS para insfilterErrorState |
residualgps | Residuos y covarianza residual de las mediciones GPS para insfilterErrorState |
fusemvo | Estados correctos utilizando odometría visual monocular para insfilterErrorState |
residualmvo | Residuos y covarianza residual de las mediciones de odometría visual monocular para insfilterErrorState |
pose | Estimación de la orientación y posición actual para insfilterErrorState |
reset | Restablecer estados internos para insfilterErrorState |
stateinfo | Mostrar información del vector de estado para insfilterErrorState |
tune | Ajuste los parámetros insfilterErrorState para reducir el error de estimación |
copy | Crear copia de insfilterErrorState |
Ejemplos
Cargue datos registrados de un vehículo terrestre siguiendo una trayectoria circular. El archivo .mat contiene mediciones de sensores IMU y GPS y la orientación y posición de la ground-truth .
load('loggedGroundVehicleCircle.mat', ... 'imuFs','localOrigin', ... 'initialStateCovariance', ... 'accelData','gyroData', ... 'gpsFs','gpsLLA','Rpos','gpsVel','Rvel', ... 'trueOrient','truePos');
Cree un filtro INS para fusionar datos IMU y GPS utilizando un filtro Kalman de estado de error.
initialState = [compact(trueOrient(1)),truePos(1,:),-6.8e-3,2.5002,0,zeros(1,6),1].'; filt = insfilterErrorState; filt.IMUSampleRate = imuFs; filt.ReferenceLocation = localOrigin; filt.State = initialState; filt.StateCovariance = initialStateCovariance;
Preasigne variables para posición y orientación. Asigne una variable para indexar los datos del GPS.
numIMUSamples = size(accelData,1);
estOrient = ones(numIMUSamples,1,'quaternion');
estPos = zeros(numIMUSamples,3);
gpsIdx = 1;Fusiona datos de acelerómetro, giroscopio y GPS. El bucle externo predice el avance del filtro a la frecuencia de muestreo más rápida (la frecuencia de muestreo de la IMU).
for idx = 1:numIMUSamples % Use predict to estimate the filter state based on the accelData and % gyroData arrays. predict(filt,accelData(idx,:),gyroData(idx,:)); % GPS data is collected at a lower sample rate than IMU data. Fuse GPS % data at the lower rate. if mod(idx, imuFs / gpsFs) == 0 % Correct the filter states based on the GPS data. fusegps(filt,gpsLLA(gpsIdx,:),Rpos,gpsVel(gpsIdx,:),Rvel); gpsIdx = gpsIdx + 1; end % Log the current pose estimate [estPos(idx,:), estOrient(idx,:)] = pose(filt); end
Calcule los errores RMS entre la posición y orientación verdaderas conocidas y la salida del filtro de estado de error.
pErr = truePos - estPos;
qErr = rad2deg(dist(estOrient,trueOrient));
pRMS = sqrt(mean(pErr.^2));
qRMS = sqrt(mean(qErr.^2));
fprintf('Position RMS Error\n');Position RMS Error
fprintf('\tX: %.2f, Y: %.2f, Z: %.2f (meters)\n\n',pRMS(1),pRMS(2),pRMS(3));X: 0.40, Y: 0.24, Z: 0.05 (meters)
fprintf('Quaternion Distance RMS Error\n');Quaternion Distance RMS Error
fprintf('\t%.2f (degrees)\n\n',qRMS);0.30 (degrees)
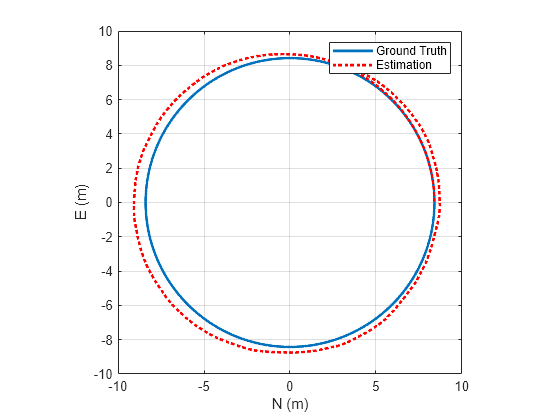
Visualice la posición real y la posición estimada.
plot(truePos(:,1),truePos(:,2),estPos(:,1),estPos(:,2),'r:','LineWidth',2) grid on axis square xlabel('N (m)') ylabel('E (m)') legend('Ground Truth','Estimation')
Algoritmos
Nota: El siguiente algoritmo sólo se aplica a un marco de referencia NED.
insfilterErrorState utiliza una estructura de filtro Kalman de estado de error de 17 ejes para estimar la pose en el marco de referencia NED. El estado se define como:
donde
q0, q1, q2, q3 –– Partes del cuaternión de orientación. El cuaternión de orientación representa una rotación del marco desde la orientación actual de la plataforma hasta el sistema de coordenadas NED local.
positionN, positionE, positionD –– Posición de la plataforma en el sistema de coordenadas NED local.
gyrobiasX, gyrobiasY, gyrobiasZ –– Sesgo en la lectura del giroscopio.
accelbiasX, accelbiasY, accelbiasZ –– Sesgo en la lectura del acelerómetro.
scaleFactor –– Factor de escala de la estimación de la pose.
Dada la formulación convencional de la función de transición de estado,
la estimación del estado previsto es:
dónde
Δ t –– Tiempo de muestreo de IMU.
gN, gE, gD –– Vector de gravedad constante en el marco NED.
Capacidades ampliadas
Historial de versiones
Introducido en R2019a